Jan 30 2020
Researchers at Cornell University have developed a new soft robot muscle that sweats to regulate its temperature.
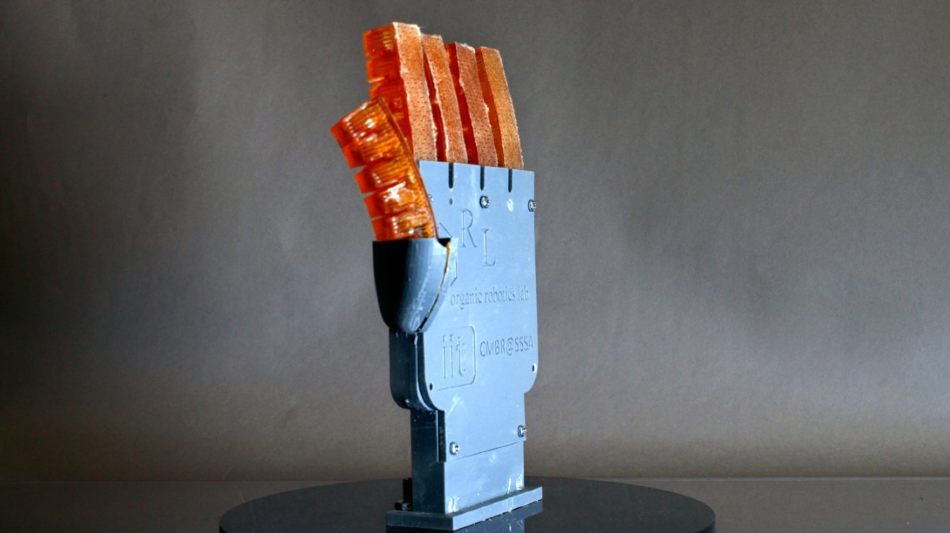 A Cornell team led by Rob Shepherd, associate professor of mechanical and aerospace engineering, made a 3D-printed hand with hydraulically controlled fingers that can cool itself by sweating. Image Credit: Cornell University.
A Cornell team led by Rob Shepherd, associate professor of mechanical and aerospace engineering, made a 3D-printed hand with hydraulically controlled fingers that can cool itself by sweating. Image Credit: Cornell University.
According to Rob Shepherd, an associate professor of mechanical and aerospace engineering, who headed the study, this kind of thermal management is a fundamental building block for allowing high-powered, untethered robots to work for an extended duration of time without overheating.
The researchers’ paper titled “Autonomic Perspiration in 3D Printed Hydrogel Actuators” was published in the Science Robotics journal on January 29th, 2020.
Controlling the internal temperature of robots is one of the barriers for creating robots that are agile, adaptable, and enduring, stated Shepherd, the senior author of the study. The robots will not operate if exothermic engines or the high-torque density motors powering these devices overheat.
This is a specific problem in the case of soft robots, which are composed of synthetic materials. But, unlike metals, which dissipate heat rapidly, synthetic materials retain their heat, even though they are more flexible. An internal cooling technology, like a fan, may not be very useful because it would add weight and take up space within the robot.
Therefore, Shepherd’s research team took a cue from sweating, which is a natural cooling system that occurs in mammals.
The ability to perspire is one of the most remarkable features of humans. Sweating takes advantage of evaporated water loss to rapidly dissipate heat and can cool below the ambient environmental temperature. … So as is often the case, biology provided an excellent guide for us as engineers.
T.J. Wallin, M.S. ’16, Ph.D. ’18, Study Co-Lead Author and Research Scientist, Facebook Reality Labs
In association with the laboratory of Emmanuel Giannelis, the Walter R. Read Professor of Engineering, the research team of Shepherd developed the required nanopolymer materials for sweating through a 3D-printing method known as multi-material stereolithography. This technique utilizes light to cure resin into predefined shapes.
“Our contribution is the making of mixtures of nanoparticles and polymeric materials that basically allow us to control the viscosity, or flow, of these fluids,” stated Giannelis, also the vice provost for research and vice president for technology transfer, intellectual property, and research policy at Cornell University.
The scientists created fingerlike actuators made up of a pair of hydrogel materials. These materials are capable of responding to temperature and retaining water—in effect, they act as “smart” sponges.
Made of poly-N-isopropylacrylamide, the base layer reacts to temperatures greater than 30 °C (86 °F) by reducing in size, and this process pushes the water up into a top polyacrylamide layer that is perforated with tiny-sized pores. These pores are responsive to the same range of temperature and release the “sweat” by dilating automatically. When the temperature goes down below 30 °C, the pores close subsequently.
Water evaporation decreases the surface temperature of the actuator by 21 °C in less than 30 seconds—a cooling process that is about three times more efficient when compared to the one in humans, discovered the scientists. When the actuators were exposed to a fan wind, they cooled off about six times faster.
The best part of this synthetic strategy is that the thermal regulatory performance is based in the material itself. We did not need to have sensors or other components to control the sweating rate. When the local temperature rose above the transition, the pores would simply open and close on their own.
T.J. Wallin, M.S. ’16, Ph.D. ’18, Study Co-Lead Author and Research Scientist, Facebook Reality Labs
When the actuator fingers were integrated into a robot hand that can seize and lift objects, the researchers found that autonomous sweating not only cooled this robot hand but also decreased the object’s temperature.
Although a robot hand may become slippery due to lubrication, changes to the hydrogel texture can offset by enhancing the robot hand’s grip, just like wrinkles that appear on the skin, added Shepherd.
One drawback of the new technology is that it can prevent the mobility of a robot. The robots also need to replenish their water supply, which has led Shepherd to visualize soft robots that will one day perspire just like mammals and even drink like them.
A robot’s ability to discharge fluids may lead to techniques for catalyzing reactions, absorbing nutrients, coating the surface of the robot with a protective layer, and eliminating contaminants, wrote the scientists.
I think that the future of making these more biologically analogous materials and robots is going to rely on the material composition. This brings up a point [about the importance of] multidisciplinary research in this area, where really no one group has all the answers.
Rob Shepherd, Study Senior Author and Associate Professor, Sibley School of Mechanical and Aerospace Engineering, Cornell University
Others who contributed to the study include postdoctoral associate and co-lead author Anand Mishra, postdoctoral associate Wenyang Pan, doctoral student Patricia Xu, and Barbara Mazzolai from the Italian Institute of Technology’s Center for Micro-BioRobotics.
The study was partly supported by the Office of Naval Research Young Investigator Program. The scientists utilized Cornell Center for Materials Research, which is funded by the National Science Foundation.
Source: http://news.cornell.edu/