Dec 16 2020
Scientists from Italy and Japan have been using chaos and nonlinear physics to develop insect-like gaits for small robots, which are complete with a locomotion controller to offer a brain-machine interface.
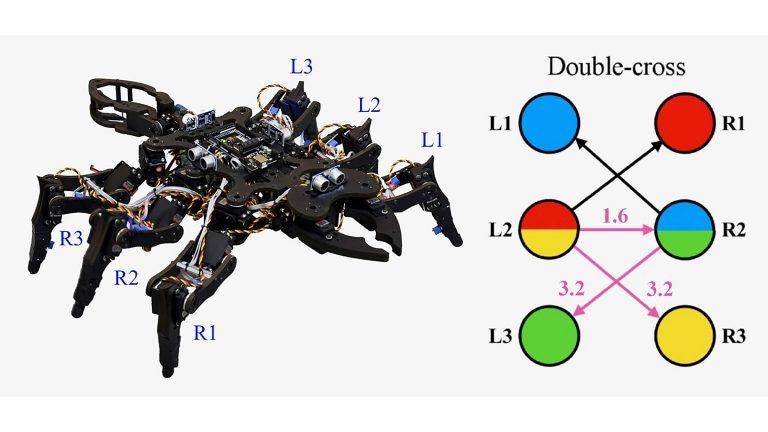 View of the experimental robot and coupling schemes for its gaits. Image Credit: Ludovico Minati.
View of the experimental robot and coupling schemes for its gaits. Image Credit: Ludovico Minati.
Physics and biology are imbued by universal phenomena grounded mainly in nonlinear physics and the researchers were motivated by this fact.
In the journal Chaos, from AIP Publishing, the team explains the use of the Rössler system—a system of three nonlinear differential equations—as a foundational stone for central pattern generators (CPGs) to regulate the gait of a robotic insect.
The universal nature of underlying phenomena allowed us to demonstrate that locomotion can be achieved via elementary combinations of Rössler systems, which represent a cornerstone in the history of chaotic systems.
Ludovico Minati, Tokyo Institute of Technology and University of Trento
Phenomena associated with synchronization enable the researchers to make less complicated networks that produce complicated rhythmic patterns.
“These networks, CPGs, are the basis of legged locomotion everywhere within nature,” stated Minati.
The team began with a minimalistic network where each instance is linked with one leg. Varying the gait or making a new one can be achieved by just performing small changes to the coupling and related delays.
Simply put, irregularity could be added by making independent systems or the complete network more chaotic. In the case of nonlinear systems, a change of output is not proportional to a change of input.
This study demonstrates that the Rössler system, besides its several intricate and interesting properties, “can also be successfully used as a substrate to construct a bioinspired locomotion controller for an insect robot,” stated Minati.
The researchers have developed their controller using an electroencephalogram to allow a brain-computer interface.
Neuroelectrical activity from a person is recorded and nonlinear concepts of phase synchronization are used to extract a pattern. This pattern is then used as a basis to influence the dynamics of the Rössler systems, which generate the walking pattern for the insect robot.
Ludovico Minati, Tokyo Institute of Technology and University of Trento
The team tapped into the basic concepts of nonlinear dynamics twice.
First, we use them to decode biological activity, then in the opposite direction to generate bioinspired activity.
Ludovico Minati, Tokyo Institute of Technology and University of Trento
The main significance of this work is that it “demonstrates the generality of nonlinear dynamic concepts such as the ability of the Rössler system, which is often studied in an abstract scenario, but is used here as a basis to generate biologically plausible patterns,” concluded Minati.
Journal Reference
Kitsunai, S., et al. (2020) Generation of diverse insect-like gait patterns using networks of coupled Rössler systems. Chaos. doi.org/10.1063/5.0021694.
Source: https://www.aip.org/