A group of roboticists, physicists, and biologists revealed that multi-legged animals and robots can walk more easily than previously believed. The research was published in the Proceedings of the National Academy of Sciences on September 5th, 2022.
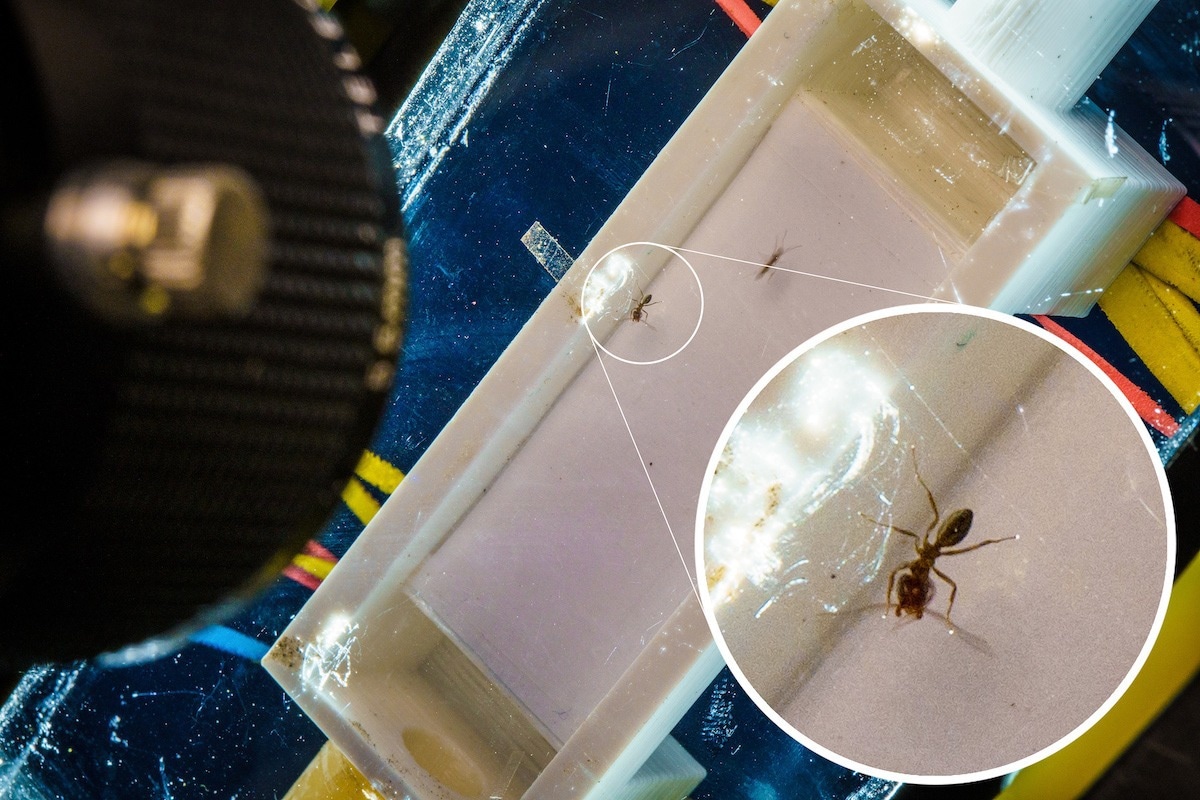 This experimental set up to study ants walking is similar to the one used in the study. Image Credit: David Baillot/University of California San Diego
This experimental set up to study ants walking is similar to the one used in the study. Image Credit: David Baillot/University of California San Diego
This is important because it will allow roboticists to build much simpler models to describe the way robots walk and move through the world.
Nick Gravish, Study Co-Author and Faculty Member, Department of Mechanical and Aerospace Engineering, University of California San Diego
The scientists were interested in seeing how their past research on ant walking might be translated to robots. They also identified a novel mathematical relationship between walking, skipping, slithering, and swimming for multi-legged creatures and robots in viscous fluids.
At the University of Michigan and UC San Diego, the team looked at two different kinds of multi-legged robots, as well as multiple colonies of Argentine ants.
“Argentine ants are very easy to study in the lab,” says the study’s coauthor Glenna Clifton, a faculty member at the University of Portland, who carried out the majority of the ant research while she was a postdoctoral scholar in Gravish’s lab at UC San Diego.
Argentine ants have good balance and can travel through various terrains for long distances. Additionally, these ants readily re-establish their colonies in lab environments after becoming acclimated. To encourage them to walk, investigators strategically placed food in different locations.
These ants will set up foraging trails and follow them. They bounce back quickly and they don’t hold a grudge.
Glenna Clifton, Study Co-Author and Faculty Member, University of Portland
Researchers employed an algorithm created by Shai Revzen’s research team at the University of Michigan, which transforms complex body motions into shapes, to investigate these various animals and robots.
This algorithm allows us to create a simple relationship between what posture you’re in and where you are going to move next.
Nick Gravish, Study Co-Author and Faculty Member, Department of Mechanical and Aerospace Engineering, University of California San Diego
Even though the two distinct types of robots in the investigation had quite different amounts of slipping motions as they walked, the scientists determined that the same algorithms could be applied to both ants and the two different sorts of robots.
Only 4.7% of their entire motion is lost to slippage when walking in Argentine ants. Comparatively, the slippage percentage for the six-legged BigANT robot ranges from 12% to 22%, and for the study’s multipod robots with six to twelve legs that occasionally crawl, it ranges from 40% to 100%.
This approach allows researchers to estimate where an insect or robot will move next based only on its current posture or shape.
The researchers state, “This provides a universal model for location that applies whenever the movement is dominated by friction with the environment.”
The mathematics the investigators used is not new. It was known that the math only applied to swimming and slithering in viscous liquids. The group demonstrated that regardless of whether the walkers are slipping or not, the same equations apply to multi-legged walking. The same guidelines also hold true for robots the size of meters as well as insects the size of millimeters, like ants. The study’s first title was “walking like a worm.”
The experts explain, “The universality of this approach may have applications in robot design and motion planning, and provides insight into the evolution and control of legged locomotion.”
These universal laws, according to researchers, may have ramifications for comprehending significant evolutionary changes, like the switch from swimming to walking. Early land creatures may have already possessed the cerebral circuitry required for locomotion on land, given that walking, even with slippage, follows the same general control principles as viscous swimming.
Two-legged animals were not studied, but the model would still hold true for them as long as they move slowly, have both feet planted firmly, and do not tumble.
The team still needs to conduct additional fine-tuning to comprehend, for instance, how friction forces affect the model.
Gravish concludes, “Either way, walking can be much simpler than we usually think.”
Source: https://ucsd.edu/