A group of mechanical engineers had conducted a study on the incredible frictional properties of snake locomotion, in order to construct more dynamic rescue robots.
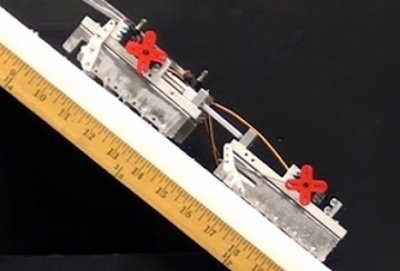 Inspired by how snakes use friction to climb things, Scalybot has scale-like teeth that can help it climb objects.
Inspired by how snakes use friction to climb things, Scalybot has scale-like teeth that can help it climb objects.
The frictional movement of the snakes is determined by scrutinizing the movements of snakes in live and in movies. This fundamental phenomenon was employed by engineers to build the robots. As a result, these robots will be able to strongly cling on to the surfaces, and identify survivors trapped in rubble during rescue operations.
A graduate student in mechanical engineering from the Georgia Institute of Technology, Hamid Marvi, along with his team, has engineered snake-inspired robots by observing live snakes. He informed that in the absence of friction, snakes cannot move but are capable of generating waves. While moving forward, it shows less friction towards the anterior portion of its body compared to its posterior one.
The snakes’ friction is due to the arrangement of scales on its body and its texture. The snakes generate friction even at sleep. However, when the snakes are awake, their friction is doubled. The level of friction is being optimized by altering the relative angle between the scales and the surface.
These principles form the basis of creating an artificial robot called Scalybot, designed to climb inclined planes. Scalybot consists of scale-like teeth underneath its body, and depending on the nature of task, these teeth can be raised or lowered, thereby navigating the specific environment.
Following this development, Marvi and his colleagues have designed and constructed an advanced version of Scalybot called Scalybot2. This novel model is equipped with an acceleration sensor that enables virtual analysis of locomotion. Its scales are capable of moving freely in all directions to locate the right surface of grip.
Source: http://www.gatech.edu/