National Institute of Standards and Technology (NIST) hosted three of the robotic competitions that were held at the IEEE International Conference on Robotics and Automation (ICRA). The conference was organised in Shanghai between the 9th and the 13th of May.
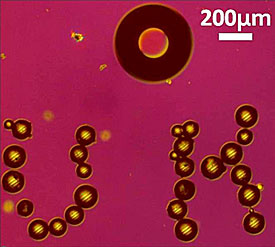 A photomicrograph showing the microrobot built by the University of Hawaii (circular object in top center) along with a series of glass beads that it assembled into a mini "U H". The 200 micrometer scale bar in the upper right corner is about the length of a paramecium.
A photomicrograph showing the microrobot built by the University of Hawaii (circular object in top center) along with a series of glass beads that it assembled into a mini "U H". The 200 micrometer scale bar in the upper right corner is about the length of a paramecium.
The first competition was the virtual manufacturing automation competition (VMAC), where the contestants were evaluated by an open source tool. In the first phase of the VMAC, the robots were supposed to pick up boxes of different sizes and weights from a conveyor belt and place them on a pallet for delivery. The second phase of the VMAC involved testing of the robot’s skills in loading trucks with the pallets in a simulated environment that was created by computer gaming engines. The winner of the first phase was Drexel University from Philadelphia and the second phase was won by Hood College from Frederick Md.
The second competition was the mobile microbotics challenge (MMC), which had participants from Europe, Canada and US. The teams were required to demonstrate the mobility and microassembly skills of their microbots through this competition. To win the mobility challenge, the microbots were required to navigate through a two-dimensional maze that was of the size of a sesame seed. In order to top the microassembly challenge, the robots had to arrange microscale components in a narrow channel. These abilities would be useful in taking the help of microbotsfor medical applications such as operations in a blood vessel and micromanufacturing based on assembly. A French team won the mobility challenge and the University of Waterloo won the microassembly challenge.
The final competition was called solutions in perception challenge (SPC), which was co-hosted by Willow Garage. The competition tested the robot’s sensing software’s ability to identify the position of 35 household specimens and 15 manufacturing equipment. These skills could be applied to clearing cluttered factory floors, disaster sites etc. University of California bagged the first place in this competition.