An all-terrain robot must be compact yet versatile enough to move across rough surfaces. The machine may also need to climb slopes of different gradients. This would prove an ideal solution for search-and-rescue operations. However, developing such a robotic machine is a difficult task for scientists.
 By observing 20 different species of snakes at Zoo Atlanta, Georgia Tech has built a new search-and-rescue robot, designed to use less energy. The project is overseen by David Hu, an assistant professor in the Schools of Mechanical Engineering and Biology, and Hamid Marvi, a Mechanical Engineering Ph.D. candidate.
By observing 20 different species of snakes at Zoo Atlanta, Georgia Tech has built a new search-and-rescue robot, designed to use less energy. The project is overseen by David Hu, an assistant professor in the Schools of Mechanical Engineering and Biology, and Hamid Marvi, a Mechanical Engineering Ph.D. candidate.
Current robots can perform these activities. However in order to do these activities, majority of robots need significant amounts of energy which in turn may result in overheating. Researchers at Georgia Tech have analyzed the movement of snakes, which are known for their flexibility and efficiency, and based on this study developed a novel machine.
Georgia Tech’s Mechanical Engineering candidate, Hamid Marvi informed that snakes utilize their scales to control frictional properties and move across large distances without using much energy.
Snakes Improve Search-and-Rescue Robots
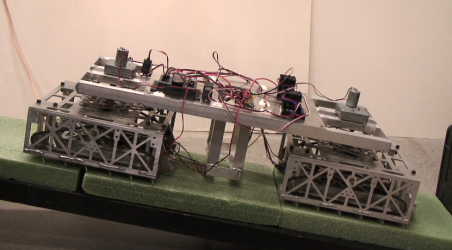
Marvi had studied and videotaped the movements of 20 different animals and then designed a two-link robot that simulates the rectilinear movement of snakes. The robot, named as Scalybot 2, was showcased at the Society for Integrative & Comparative Biology (SICB) in Charleston, S.C.
Marvi further informed that a snake does not have to twist its body to move across the ground. It simply lifts its ventral scales and pushes itself in the forward direction by transmitting a muscular wave from its head to tail. This rectilinear movement proves useful for crawling under the gaps, an important advantage for search-and-rescue robots.
Similarly, the Scalybot 2 adjusts the angle of its scales automatically when it comes across different kinds of slopes. This adjustment enables the robot to create or fight friction. The robot can move backward and forward and can be controlled with the help of a remote-controlled joystick.
The researchers are studying animal locomotion. They have analyzed how mosquitoes fly through heavy rainstorms and how other animals shake off water from their bodies. Earlier, the researchers had developed a two-link climbing robot called Scalybot 1 that simulates the movement of concertina.
The study is supported by the National Science Foundation (NSF).