A team of engineers at MIT, led by Pierre Lermusiaux has formulated a mathematical procedure, wherein path planning can be optimized for automated underwater vehicles (AUVs) for complex shorelines and in areas where strong shifting currents prevail.
 optimal paths for automated underwater vehicles
optimal paths for automated underwater vehicles
The paths, obtained through the system are optimized for low energy consumption, minimal travel time, or to maximize major data collection. The research results will be presented at the annual IEEE International Conference on Robotics and Automation in May.
The complexity in ocean environments, the challenges of planning optimal paths and the need for developing methodology and algorithm for AUVs has inspired MIT’s Multidisciplinary Simulation, Estimation, and Assimilation Systems (MSEAS) group, for this development.
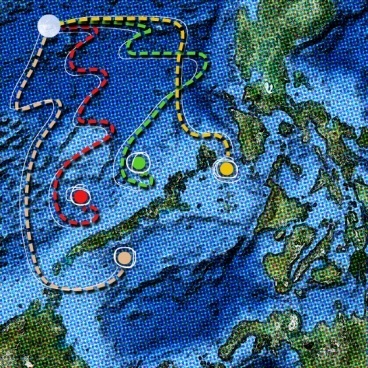
For instance, the team’s simulations include a virtual fleet of 1,000 AUVs, directed from one or more ships that aim for different targets. The devised system also contains ‘forbidden’ zones, to be avoided by the craft and the fixed obstacles affecting the flow of the currents and the underwater craft, and moving obstacles like ships under motion.
By using the current’s ‘free ride’, the craft navigates through indirect pathways, winding around in loops and whorls similar to a random walk. Moreover, more energy-efficiency can be achieved by the AUV by rising above, or diving under currents, jets, eddies or other features in the ocean. Uncertainties in ocean predictions and how they affect the optimal paths can also be accounted for.
According to Lermusiaux, a number of data-collection vehicles are employed by the system to collect the important data within a short time, which can be used for biological or environmental and in fisheries. In addition, similar computational systems can be implemented for directing automated vehicles through various obstacles and flows. The algorithm enables real-time control and adjustments. The system in-built with obstacle-avoidance functions can safeguard the AUVs.