Oct 1 2014
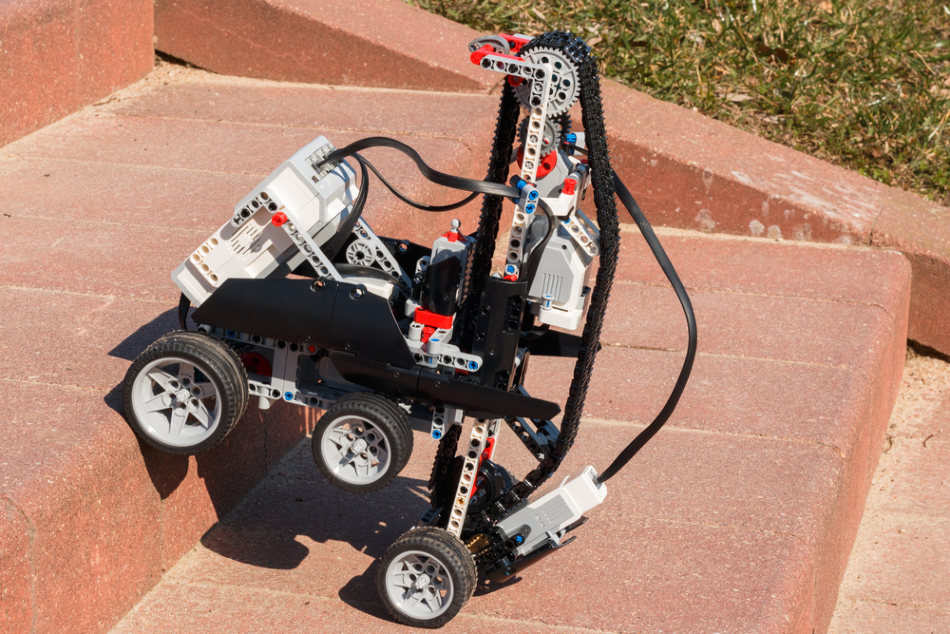
Image Credit: AlesiaKan/Shutterstock.com
Climbing robots are flexible devices that can climb steep and vertical surfaces.
They are divided into three different categories based on their locomotion mechanism as follows:
- Legged climbing robots
- Chain- or wheel-driven climbing robots
- Climbing robots with grippers and arms
Legged and gripper-integrated robots are suitable for complex, irregular surfaces. Chain or wheel-driven robots are employed on walls and other vertical surfaces in materials such as steel, concrete, brick and glass.
Basic Principles
The principles of operation of climbing robots include:
- Magnetic adhesion – Climbing robots that operate on magnetic adhesion utilize multiple vacuum chambers to enable them to move on concrete walls. They also include a propulsion system with omnidirectional wheels. The adhesion is performed by the movement of the vacuum chambers. The robot is integrated with other pressure valves and sensors for controlling the locomotion.
- Grasping – Shady3D is a three-dimensional robot consisting of a structural bar with grippers at each end. The grippers are the key components of robot locomotion. The robot has three rotational degrees of freedom which enable it to make transitions between the planes.
- Pressure and molecular force – Researchers from SRI International have designed a robot that climbs by inducing electrostatic charges in the wall surface. This robot consists of a series of electrodes covered by a thin, flexible rubber layer that provides insulation against the wall. The electrodes are charged up by the robot which in turn attracts the charges of the wall providing the required friction to climb the wall.
Applications of Climbing Robots
Some of the major applications of climbing robots include:
- Cleaning large commercial ships and airplanes
- Checking pipes and valves in chemical industries
- Carrying payloads such as sensors and cameras
- Remote inspection of oil tanks, nuclear plants, glass walls, and steel bridges
Article updated on 04/03/20 by Ben Pilkington