I am currently a post-doctorate at the BioFrontiers Institute, Colorado University at Boulder. I work in the lab of professor Orit Peleg studying the collective behavior of living systems, such as worm and insect swarms.
Having done my bachelor's and my Ph.D. in physics, I apply this background along with interdisciplinary concepts and tools to the study of collective behavior in living systems, including collective locomotion in worm blobs, communication in firefly swarms, and self-organization in plants.
During grad school at the University of California, Santa Barbara, I was advised by professor Jean Carlson. I became interested in researching complex living systems due to their interdisciplinary nature, combining physics with biology, computer science, and engineering.

Image Credit: Sketchart/Shutterstock.com
Could you give a brief explanation of collective behavior, and how this can relate to controlling large robotic systems?
Many systems in nature consist of these individual interacting elements like fish schools, bird flocks, and bee swarms. We usually model these systems from the perspective of each individual constantly sensing and analyzing its local environment, its neighbors and responding to this environment accordingly.
At the overall group level, these interactions can manifest as emergent collective phenomen. For instance, bees may pack together into a swarm that adapts its geometry to maintain mechanical stability or adjust to changing temperatures. Ants can build towers, rafts, and bridges.
Crucially, these systems are decentralized. No project manager governs the building of an ant tower, for instance. So, each individual is simply sensing and responding to local stimuli and interacting with its neighbors; hence these decentralized collectives in nature are a large source of inspiration in developing swarm robotics systems that can consist of many individual robots.
Each robot would be a self-contained unit that can function on its own, usually according to some local rules, but together the swarm can achieve functions that a single robot would not otherwise perform. We also see in biological systems that, for instance, organisms could navigate more effectively or survive better as a collective.

Blackworms blob. Image Credit: Dr. Chantal Nguyen /BioFrontiers Institute of the University of Colorado Boulder
‘Entangled active matter collectives’ has been cited as a hot topic in robotics. Could you discuss this further?
Entangled active matter is a term that we used to describe the blackworm blobs that we modeled in our work. In these systems, the worms are active in that they convert energy into directed motion, and they are also attached to one another through physical entanglement.
On the one hand, there has been a lot of research in decentralized swarm systems, and constituent robots are often relatively rigid.
On the other hand, there have been many developments in soft robotics, drawing inspiration from fish, worms, and other creatures in other systems in nature to design flexible and deformable robots. With my collaborators having discovered that a worm blob can navigate changing environments while remaining a cohesive, entangled unit, we cite soft swarm robotics as one potential long-term goal in the development of decentralized swarms, where the individuals are flexible and also can physically attach to one another resulting in some collective behavior.
Quadruped animal models have often been used to improve robotic locomotion. What can we learn from worms such as the California blackworm that we can apply to robotic locomotion?
As I mentioned previously, my collaborators had observed this remarkable collecting motility in a worm blob; it is not just that the worms are moving in unison but remain entangled with one another. They observed a differentiation of activity that likely served as the mechanism for the collective motility.
It was observed that worms at the front are outstretched and elongated. They pull along the clump of worms at the back, which remain more heavily entangled while also lifting themselves off the surface. These observations could provide some insights into the design of motile entangled collectives for robotics.

Microscopic image Blackworm blob. Image Credit: Harry Tuazon/Georgia Tech School of Chemical and Biomolecular Engineering
What other characteristics of this particular species motivated you to model its behavior in this study?
First of all, you have the observation of collective motility in the temperature gradient. That was the initial driving motivation that led us to explore the behavior through modeling and simulation. We wanted to develop a physics-based model of self-propelled, long, slender individuals that interact with each other via local forces and then identify conditions under which locomotion in such a system could emerge.
Realistic theoretical simulations are enabling innovation in a broad range of sectors. Do you think with increased advancement of this technology, computational models will replace most if not all research and development steps?
Definitely not. Models could help us understand and make testable predictions of, for instance, natural phenomena that we draw inspiration from in designing various things for technological purposes, but they should not exist without experimentation.
The success of collective movement is dependent upon a balance between individual movement and worm ‘clinginess’, and worms are described as having a temperature preference.
Simulated blob demonstrating collective locomotion across the temperature gradient (left, hot; right, cold). Each worm is represented by a different color. Video Credit: BioFrontiers Institute of the University of Colorado Boulder
Does the behavior of the organismal model limit the potential applications of simulations?
I would say no. Any conclusions from a model should not limit any potential applications. A lot of my work is driven by this cycle of model, experimentation, model, experimentation.
Although we observed that real worms likely lie within a particular regime where a balance between the active motion and the clinginess is achieved, it could be possible to manipulate the behavior of individual worms in future experiments. We could also perform experiments on other species of long, slender organisms that may have slightly different properties compared to the blackworm. Doing so would allow us to test predictions of what we would observe in other regimes. It is also possible we could observe something unexpected in those regimes.
Understanding the fuller picture that we can explore in our model gives us a lot of insight into both nature and potential applications in the technology and engineering sectors.
What sectors do you envision robotic systems that possess this ‘intelligent’ collective movement to be particularly applicable to?
Some potential applications that I could envision include, for instance, the design of smart, adaptive materials that could change their geometry and deform and flex as needed. I would also say that there is a push for developing soft robotics for biomedical applications, which could potentially include diagnostic tools or surgical tools, and wearable devices.
What are the next steps for this research? Are there any innovations that are being strived towards?
We aim to extend our model to three dimensions. Currently, we have a 2D model that captures the observed worm behavior, but it will be important to model the blobs in 3D.
This can allow us to explicitly capture the physical entanglement of the individual worms, and in doing so, we aim to further investigate the physical mechanisms by which the blob moves, namely the differentiation of activity.
We also aim to perform further experiments, both on blackworms but potentially other long slender organisms including other species of worms, and nematodes that form swarms. We may also explore the relationship between the size and the shape of the constituent individual with the collective behavior to potentially work toward more general theories of locomotion and swarming.
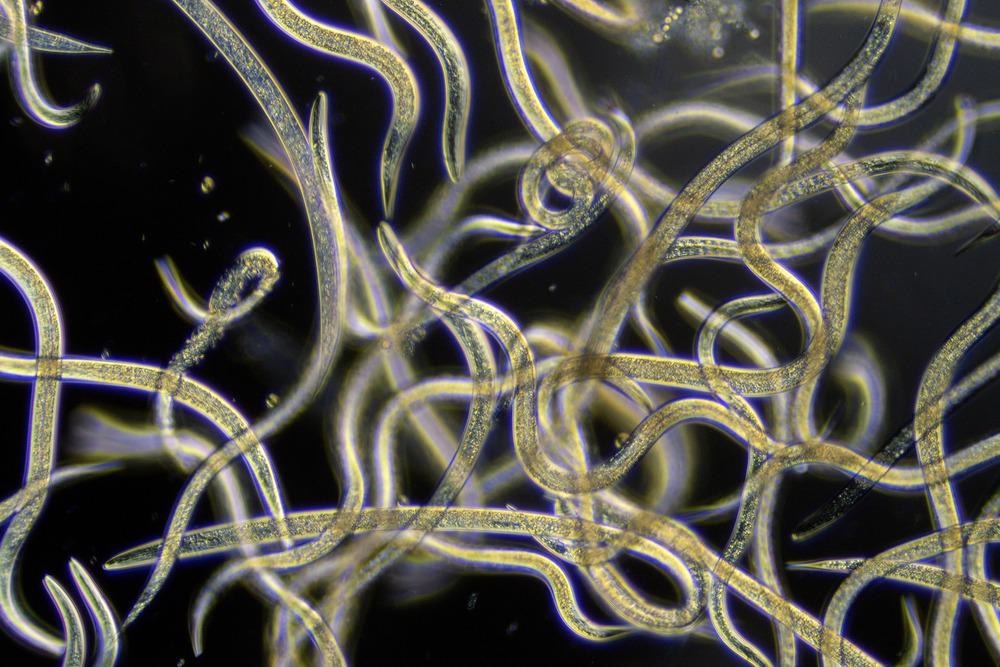
Image Credit: D. Kucharski K. Kucharska/Shutterstock.com
In your opinion, what has been the most exciting aspect of this research?
First of all, seeing the beautiful and fascinating experiments demonstrating the remarkable behavior of the worms. Both the collective motility but also just the phase transitions that the worm blob can undergo.
On the modeling side, applying the physics of active polymers, something often studied in micro-scale biological systems and applying that to this meso-scale or macro-scale biological system.
This work has been really exciting and we hope that it opens the door to future research of the collective behavior of other long, slender organisms.
Where can readers find more information on the progression of this research?
You can follow me on @nguyenchantal as well as the Twitter accounts of my PIs, @oritpeleg, and @BhamlaLab. You can also visit our websites https://www.bhamla.gatech.edu/ and https://www.peleglab.com/.
About Dr. Chantal Nyugen
 Chantal is currently a postdoctoral associate at the BioFrontiers Institute of the University of Colorado Boulder, working in the lab of Prof. Orit Peleg. She applies her background in physics to the study of collective behavior in living systems, including collective locomotion in worm blobs, communication in firefly swarms, and self-organization in plants.
Chantal is currently a postdoctoral associate at the BioFrontiers Institute of the University of Colorado Boulder, working in the lab of Prof. Orit Peleg. She applies her background in physics to the study of collective behavior in living systems, including collective locomotion in worm blobs, communication in firefly swarms, and self-organization in plants.
Previously, Chantal obtained her PhD in physics at the University of California, Santa Barbara, and her BS in physics at California State University, Los Angeles.
Disclaimer: The views expressed here are those of the interviewee and do not necessarily represent the views of AZoM.com Limited (T/A) AZoNetwork, the owner and operator of this website. This disclaimer forms part of the Terms and Conditions of use of this website.