Apr 8 2019
The world is full of despondently complicated systems: transportation systems, biological systems, financial systems, and so on. These so-called difficult systems—natural or man-made—are systems that are basically challenging to predict because of emergent collective dynamics impacted by external environmental parameters.
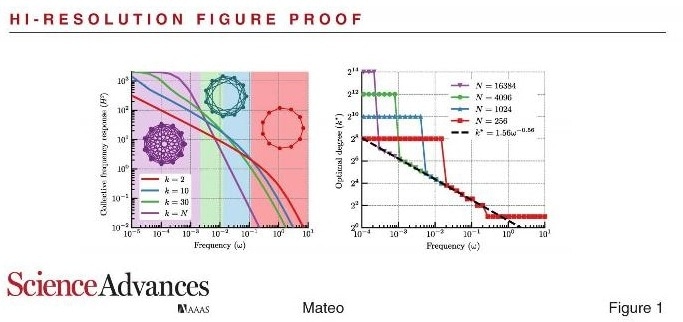 (Left) Collective frequency response for a ring network - (Right) Optimal degree k* for maximum collective response. (Credit: SUTD. Usage Restrictions: Only with permission from SUTD)
(Left) Collective frequency response for a ring network - (Right) Optimal degree k* for maximum collective response. (Credit: SUTD. Usage Restrictions: Only with permission from SUTD)
The complexity of these systems is entrenched in the complicated interdependencies between these constitutive elements and interactions with the external world. Comprehending the propagation of exogenous perturbations is of serious significance to complex systems. For example, imagine a local shutdown at one end of the power grid, and how it can result in a huge cascading failure, intensifying into a mass-scale blackout such as the 2003 Northeast blackout in the United States. Visualize how a snowstorm in the metropolitan area of New York causes an avalanche of delays in Los Angeles, San Francisco, and all over the West Coast. Or think of trends launched by celebrities, and how they from time to time go viral, propagate, and intensify via tweets/retweets, likes, and sharing.
For decentralized networked systems working in dynamic settings, the ability to react to changing conditions is vital. It can be a life and death matter for birds flocking and steering to evade a predator attack. It can also be a matter of optimal efficiency for multi-robot systems working collectively and exposed to changing environments. It is, thus, important to examine and understand the impact of the network topology on the system's collective reaction.
Keeping this in mind, Bouffanais and his team at the Singapore University of Technology and Design (SUTD) considered an archetypal model of distributed decision-making: the objective was to explore the collective capacity of the system in reacting to local external perturbations. Their theoretical network science results were confirmed with experiments on the collective behavior of a swarm of land robots. They exposed a nontrivial relationship between the dynamics of the perturbation and the ideal network topology. The evolving collective response of the swarm to a slow-changing perturbation grows with the degree of the interaction network, but the contrary is true for the reaction to a rapid-changing one. Their research exposed the existence of a particular number of interactions among units necessary to create an optimal collective reaction.
Given the explosion in the development of distributed/decentralized systems, this research shows that a dynamic rewiring of the interaction network is essential to the effective collective operations of these complex engineered systems at different time scales.
Roland Bouffanais, Chief investigator, Associate Professor, SUTD