The deep-sea is a hostile environment to us humans and prevents us from getting up close and personal with the creatures that dwell there. However, when we plunge the depths with our machines and robotic equipment, we are likely making this environment also treacherous for its natural inhabitants – especially those with soft bodies such as the many species of jellyfish or the infamous giant squid. So, for effective research to take place that doesn’t harm these soft-bodied species, robotics researchers at Harvard have dived right in to make sure the occupants of the deep are handled with care.
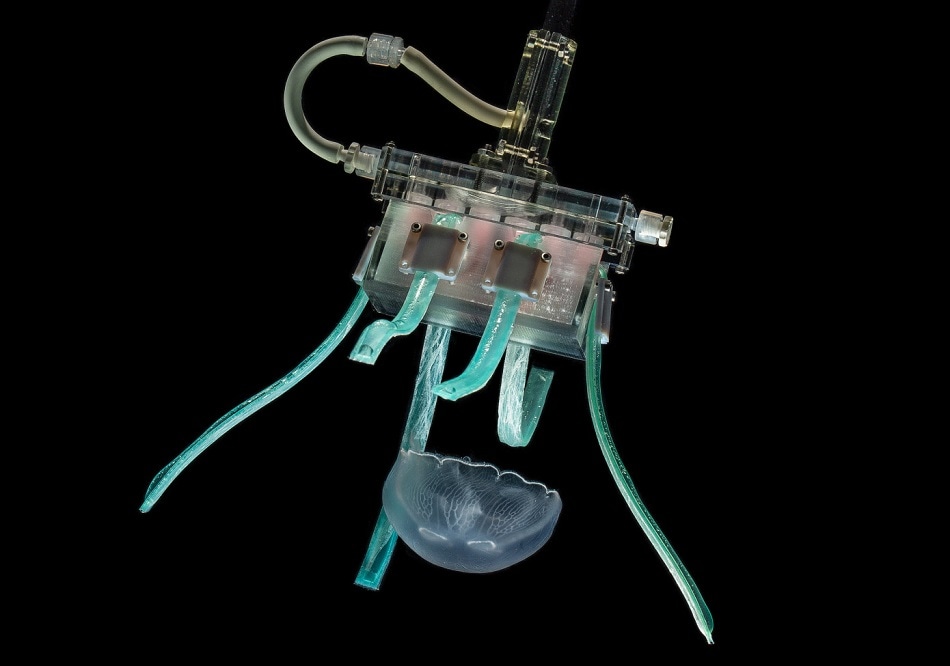
Image credit: Sinatra et al. / Science Robotics
The team at Harvard’s Wyss Institute for Biologically Inspired Engineering, the Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS), and Baruch College at City University of New York have created robotic grippers with super -soft spaghetti-like hydraulic fingers that can collect and release jellyfish species and other soft-bodied marine life without causing them injury or harm.
Previous collection methods involved vacuum-like mechanism that would suck marine life and organisms into containers for surface delivery. The animals of the deep-sea can be easily damaged, even with careful handling. So, while they may be able to withstand pressures and temperatures no surface dweller could manage, they are still delicate creatures. The researchers at Harvard’s Wyss Institute hope that their latest innovations enable safer and more practical ways of catching these creatures for inspection in situ.
Jellyfish are of particular interest to marine biologists and other scientists due to their exceptional anatomy and physiology. Made up around 95% water, it is extremely difficult for researchers to handle these remarkable tentacular beings. The technology and machinery currently available are more likely to shred their bodies rather than safeguard them.
The new super-soft grippers developed by the robotics unit at Harvard consist of six fingers made out of flat silicone with a hollow chamber inside bonded to a layer of flexible yet stiff polymer nanofiber. These spaghetti-like appendages are then attached to a 3D-printed palm that pumps water into them. As the channels fill, each one curls with a pressure of a mere 0.0455 kPA – 10% of the pressure that a human eyelid exerts on the eye. This means the grip is just enough pressure to contain the species collected for examination without running the risk of causing harm to it.
During the testing phase, the research team started with ‘silicone’ jellyfish to simulate the interaction between the creature and the basic functions of the grippers as well as trying to determine the best methods to capture the marine life. The next stage moved to test golf-ball-sized live jellies at the New England Aquarium to show that the animals could be grasped with the right level of care to prevent stress or harm.
Marine biologists have been waiting a long time for a tool that replicates the gentleness of human hands in interacting with delicate animals like jellyfish from inaccessible environments
David Gruber, a professor of biology and environmental science at Baruch College
Gruber continued, "This gripper is part of an ever-growing soft robotic toolbox that promises to make underwater species collection easier and safer, which would greatly improve the pace and quality of research on animals that have been under-studied for hundreds of years, giving us a more complete picture of the complex ecosystems that make up our oceans."
This progress in the technology makes for compelling news to marine biologists and scientists alike that are interested in collecting jellyfish and other deep-sea specimens, without causing trauma to the animals themselves. Furthermore, there is future potential that may enable closer contact to marine life even for the casual snorkeler or scuba-diver.
Disclaimer: The views expressed here are those of the author expressed in their private capacity and do not necessarily represent the views of AZoM.com Limited T/A AZoNetwork the owner and operator of this website. This disclaimer forms part of the Terms and conditions of use of this website.