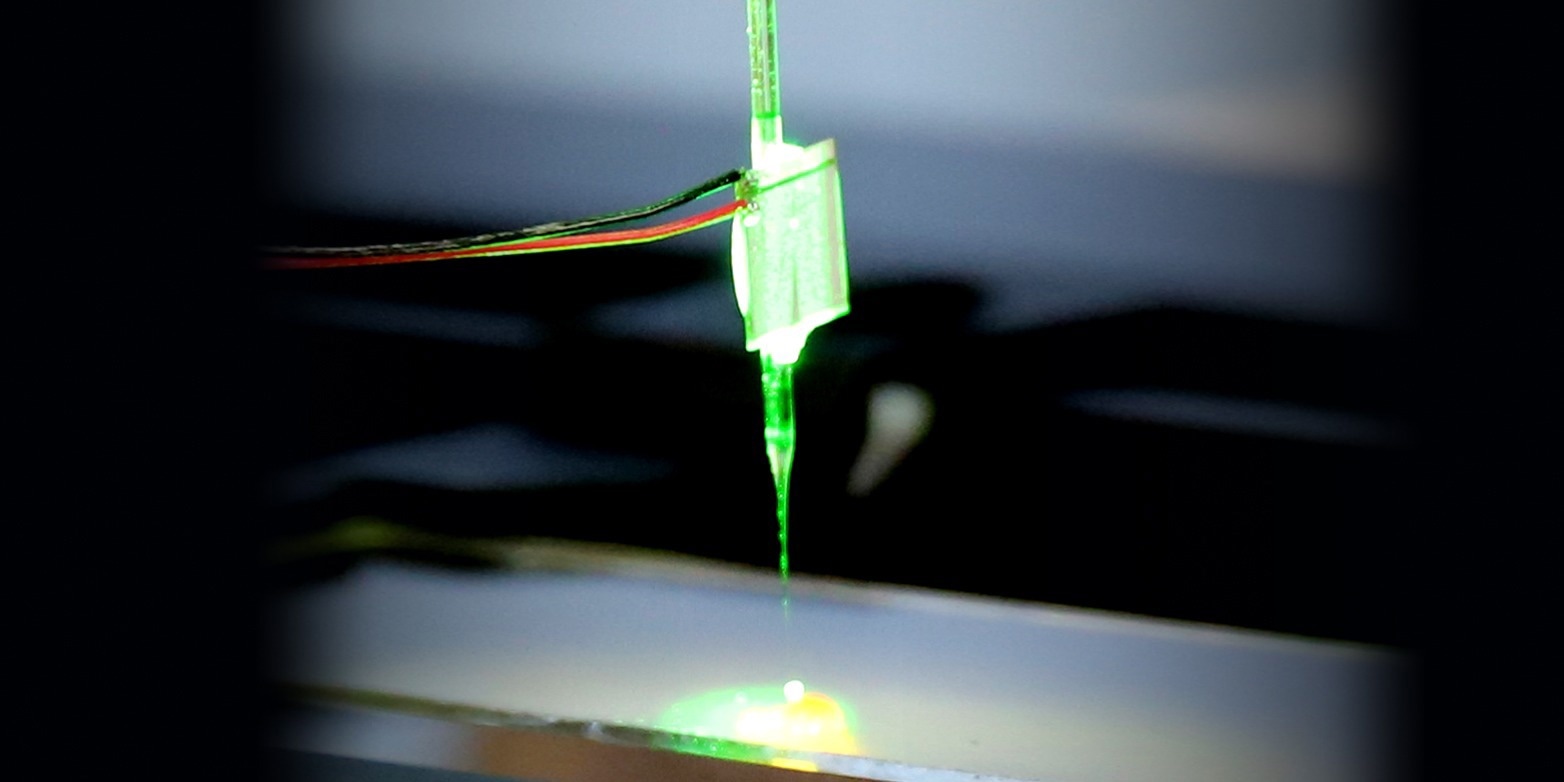
Using a glass needle made to oscillate with the assistance of ultrasound, liquids can be manipulated and particles can be trapped. Image Credit: ETH Zurich
Researchers headed by ETH Professor Daniel Ahmed are currently integrating traditional microfluidics and robotics. A device that makes use of ultrasound was developed that can be fixed to a robotic arm and is ideal for executing an extensive range of tasks in microfluidic and microrobotic applications.
The device consists of a thin, pointed glass needle and a piezoelectric transducer that is responsible for the needle oscillating. Similar transducers have been utilized in ultrasound imaging loudspeakers and professional dental cleaning equipment.
By dipping the needle into a liquid, the researchers make a three-dimensional pattern made of multiple vortices. As this pattern relies on the oscillation frequency, it can be controlled.
The researchers were able to use this to illustrate various applications. Initially, they were able to mix small droplets of highly viscous liquids.
The more viscous liquids are, the more difficult it is to mix them. However, our method succeeds in doing this because it allows us to not only create a single vortex, but to also efficiently mix the liquids using a complex three-dimensional pattern composed of multiple strong vortices.
Daniel Ahmed, Professor, ETH Zurich
Secondly, the researchers were able to pump fluids via a mini-channel system by making a particular pattern of vortices and positioning the oscillating glass needle next to the channel wall.
Thirdly, they were successful in making use of their robot-assisted acoustic device to catch fine particles that are in the fluid. This works since a particle’s size determines its reaction to the sound waves. Relatively large particles move toward the oscillating glass needle, where they tend to accumulate.
The scientists illustrated how this method has the potential to capture not just an inanimate particle but also biological cells present in a fluid.
In the past, manipulating microscopic particles in three dimensions was always challenging. Our microrobotic arm makes it easy. Until now, advancements in large, conventional robotics and microfluidic applications have been made separately. Our work helps to bring the two approaches together.
Daniel Ahmed, Professor, ETH Zurich
Future microfluidic systems can be developed in a similar way to the robotic systems available at present. A suitably programmed single device would be able to tackle a range of tasks.
Mixing and pumping liquids and trapping particles—we can do it all with one device.
Daniel Ahmed, Professor, ETH Zurich
This implies that there will be no need for microfluidic chips of the future to be custom-developed for every particular application. The scientists would next like to integrate numerous glass needles to make more complicated vortex patterns present in the liquids.
Besides laboratory analysis, Ahmed could visualize other applications for microrobotic arms, like classifying small objects. Also, the arms could possibly be utilized in the field of biotechnology as a way of introducing DNA into individual cells. Eventually, it may be possible to employ them in 3D printing and additive manufacturing.
Journal Reference
Durrer, J., et al. (2022) A robot-assisted acoustofluidic end effector. Nature Communications. doi.org/10.1038/s41467-022-34167-y