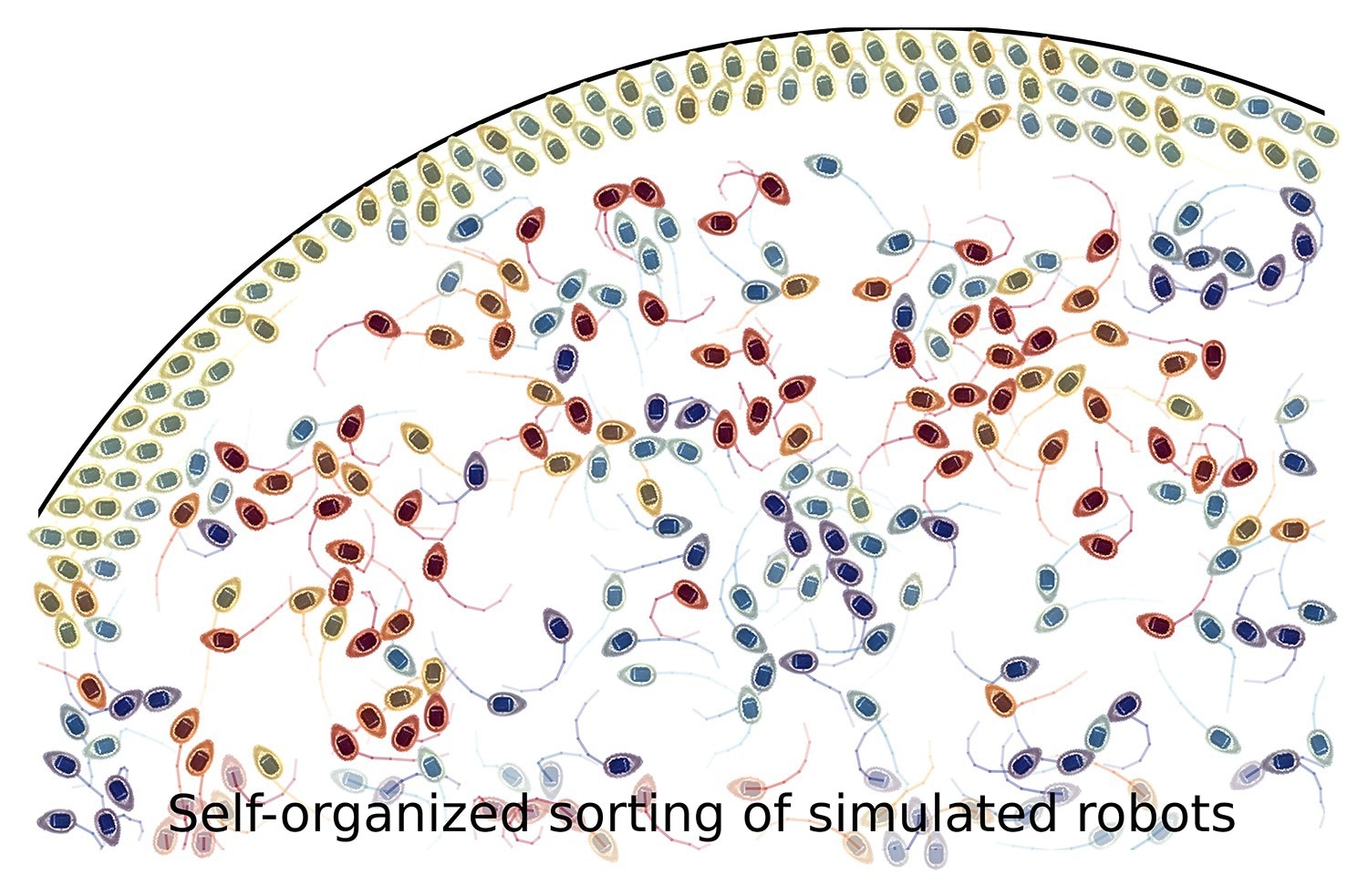
Simulated microrobots sorting themselves in the vicinity of a confining wall: Microrobots with a larger trajectory radius become trapped against the wall upon which they exert pressure while those with smaller trajectory radii are able to continue to move freely within the enclosed space. Image Credit: Frank Siebers
In the future, minuscule robots that will be utilized in pharmaceutical and medical applications may be able to transport medication to targeted sites in the body. Statistical physics has the potential to contribute to the development of such technologies.
The study outcomes of the team illustrating that there might be an alternative route to identify programmable active matter have been reported in the journal Science Advances.
Collectives of Robotic Units Could Solve Tasks that a Single Machine Cannot Solve on Its Own
Scientists are looking for new methods to execute tasks on the micro- and nanoscale that are otherwise hard to realize, especially as the miniaturization of devices and components is starting to attain physical limits.
One new option being taken into account is the use of collectives of robotic units in place of a single robot to finish a task.
The task-solving capabilities of one microrobot are limited due to its small size. But a collective of such robots working together may well be able to carry out complex assignments with considerable success.
Thomas Speck, Professor and Study Head, Mainz University
In this context, statistical physics turns out to be appropriate in that it analyzes models to explain how such collective behavior might arise from interactions.
The collective behavior of various small and commercially available robots has been studied by the research team. Such alleged walkers are propelled via internal vibrations sent to two rows of tiny legs.
Since the length, shape, and stiffness of the legs differ slightly from robot to robot, they follow circular orbits with a radius that is specific to each walker. Watching and moving like little beetles, such robots consist of an elliptical form and are sent off in a new direction when they are subject to collide with each other.
Our aim was to examine and describe the collective behavior of these robots and determine whether it might be possible to derive potential uses from this. At the same time, we as physicists were also interested in the phenomena per se.
Frank Siebers, Study Lead Author, Johannes Gutenberg Universitat Mainz
Scientists could note two effects when the collective of robots have differences concerning their orbits, that is, in a group displaying higher diversity. Initially, the walkers needed less time to explore the space they were positioned in.
Additionally, when contained within an enclosed space, they started to experience self-organized sorting. Based on their orbital radius, the robots either remained at the confining wall or started to collect inside the spacious interior.
Statistical physics offers knowledge of the behavior of collectives.
It would be possible to exploit this kind of activity to get robots to transport a load and to interact with that load, for example. The speed with which they would be able to traverse spaces would increase, meaning that the load would be delivered sooner. Statistical physics can help to uncover new strategies that may be utilized by collectives of robots.
Thomas Speck, Professor and Study Head, Mainz University
The field of active matter models and robotics spans several realms of the living and the non-living world in which collective behavior or collective movement could be noted.
“What we have done here is to apply the theory underlying our understanding of clustering and swarming to robotic systems,” stated Frank Siebers of JGU.
The study was financially supported under the aegis of the Collaborative Research Center/TRR 146 on Multiscale Simulation Methods for Soft Matter Systems, a cooperative project involving Johannes Gutenberg University Mainz, TU Darmstadt, and the Max Planck Institute for Polymer Research funded by the German Research Foundation (DFG).
Journal Reference
Siebers, F., et al. (2023) Exploiting compositional disorder in collectives of light-driven circle walkers. Science Advances. doi.org/10.1126/sciadv.adf5443.