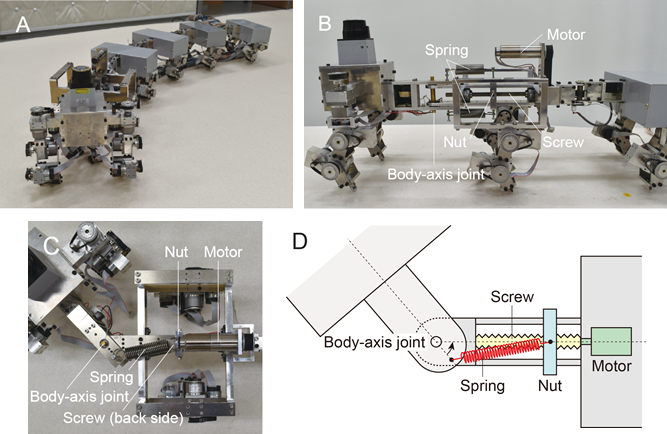
Myriapod robot (A) and Variable body-axis flexibility mechanism (B. Front view, C. Top view, D. Schematics of top view). Image Credit: 2023, Aoi et al., Soft Robotics
A new type of walking robot that takes the benefits of dynamic instability to navigate has been invented by scientists from the Department of Mechanical Science and Bioengineering at Osaka University.
By altering the couplings’ flexibility, the robot could be made to turn in the absence of the need for complicated computational control systems. This work might help the making of rescue robots that can traverse irregular terrain.
The majority of animals on Earth have developed a strong locomotion system with the help of legs that offer them a high degree of mobility over an extensive range of environments. Somewhat frustratingly, engineers who have made an attempt to replicate this method have frequently discovered that legged robots are unexpectedly delicate.
The collapse of even one leg as a result of repeated stress could severely restrict the potential of such robots to function. Besides, regulating numerous joints so the robot could transverse complicated environments needs a lot of computer power.
For building autonomous or semi-autonomous robots, enhancements in this design would be extremely useful. These could serve as exploration or rescue vehicles and enter hazardous areas.
Currently, investigators from Osaka University have come up with a biomimetic “myriapod” robot that makes use of a natural instability that has the potential to convert straight walking into curved motion.
In a study reported recently in the Soft Robotics journal, scientists from Osaka University explain their robot, comprising six segments (with two legs linked to each segment) and adaptable joints.
With the help of an adjustable screw, it is possible to alter the flexibility of the couplings with motors during the walking motion. The scientists showed that raising the flexibility of the joints resulted in a situation known as a “pitchfork bifurcation,” in which straight walking turns out to be unstable. Rather, the robot changes to walking in a curved pattern, either to the right or to the left.
Generally, engineers would try to remove instabilities, but making controlled use of them could allow effective maneuverability.
We were inspired by the ability of certain extremely agile insects that allows them to control the dynamic instability in their motion to induce quick movement changes.
Shinya Aoi, Study Author, Osaka University
Since this method does not directly guide the movement of the body axis but rather regulates the flexibility, it could greatly help decrease both the computational complexity and the energy needs.
The potential of the robot was tested by the group to reach particular locations, and they discovered that it could navigate by taking curved paths toward targets.
We can foresee applications in a wide variety of scenarios, such as search and rescue, working in hazardous environments, or exploration on other planets.
Mau Adachi, Study Author, Osaka University
Future versions might include extra segments and control mechanisms.
Myriapod robot with variable body-axis flexibility
Movie 1. Maneuverable locomotion of a myriapod robot to approach multiple targets placed on the floor sequentially. Video Credit: 2023, Aoi et al., Soft Robotics
Journal Reference
Aoi, S., et al. (2023) Maneuverable and Efficient Locomotion of a Myriapod Robot with Variable Body-Axis Flexibility via Instability and Bifurcation. Soft Robotics. doi.org/10.1089/soro.2022.0177.