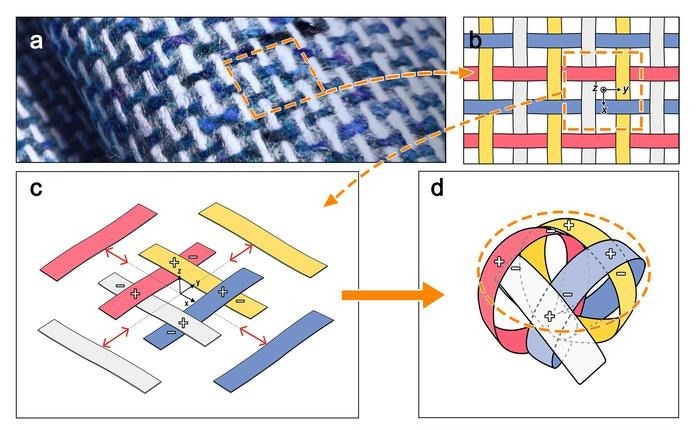
Gripper schematic with weave structure. Image Credit: Korea Institute of Science and Technology
Dr. Song Kahye of the Intelligent Robotics Research Center at the Korea Advanced Institute of Science and Technology (KIST) and Professor Lee Dae-Young of the Department of Aerospace Engineering at the Korea Advanced Institute of Science and Technology (KAIST) have collaborated to produce a soft gripper with a woven structure that can grasp objects weighing more than 100 kg with only 130 grams of material.
The study team used a novel structure inspired by textiles to boost the loading capacity of the soft robot gripper, rather than the traditional way of inventing new materials or strengthening the structure. They worked on weaving, which involves tightly interweaving individual threads to make a robust fabric that can stably hold heavy objects and has been used for ages in clothes, bags, and industrial textiles. The team made use of thin PET plastic. The grippers were created such that the strips could interweave and unwind, forming a woven structure.
The resultant woven gripper, which weighs 130 grams, has a 100-kilogram weight capacity. Since a gripper that can lift the same weight weighs 100 kilograms, while conventional grippers of the same weight can only lift a maximum of 20 kg, the team was able to increase the load capacity relative to its own weight.
The soft robot gripper created by the study team is also incredibly affordable since it employs plastic, a material that only costs a few thousand won per unit and can be utilized as a universal gripper to hold things of all sizes, shapes, and weights.
Additionally, the production of the soft robot gripper can be finished in less than 10 minutes since it only requires the attachment of a plastic strip, and because it is simple to change and maintain, the process efficiency is good.
The gripper can be made of different materials, such as rubber and elastic compounds, in addition to PET, which is the primary material used by the research team. This allows the team to customize and use grippers suitable for industrial and logistics sites that demand strong gripping performance or various environments that need to withstand harsh conditions.
The woven structure gripper developed by KIST and KAIST has the strengths of a soft robot but can grasp heavy objects at the level of a rigid gripper. It can be manufactured in a variety of sizes, from coins to cars, and can grip objects of various shapes and weights, from thin cards to flowers, so it is expected to be used in fields such as industry, logistics, and housework that require soft grippers.
Dr. Kahye Song, Senior Research Scientist, Korea Institute of Science and Technology
The Ministry of Science and ICT (Minister Lee Jong-ho) funded the study through the KIST Major Project and the Korea study Foundation Basic Research Program, as well as the Overseas Advanced Scientist Invitation Program and the Basic Research Laboratory Support Program.
The study’s findings were published on August 2nd, 2023, in the international journal Nature Communications (IF:16.6, top 8.2% in JCR) as Editors’ Highlights, which showcases the best 50 publications in each discipline.
Journal Reference
Kang, G., et al. (2023) Grasping through dynamic weaving with entangled closed loops. Nature Communications. doi:10.1038/s41467-023-40358-y.