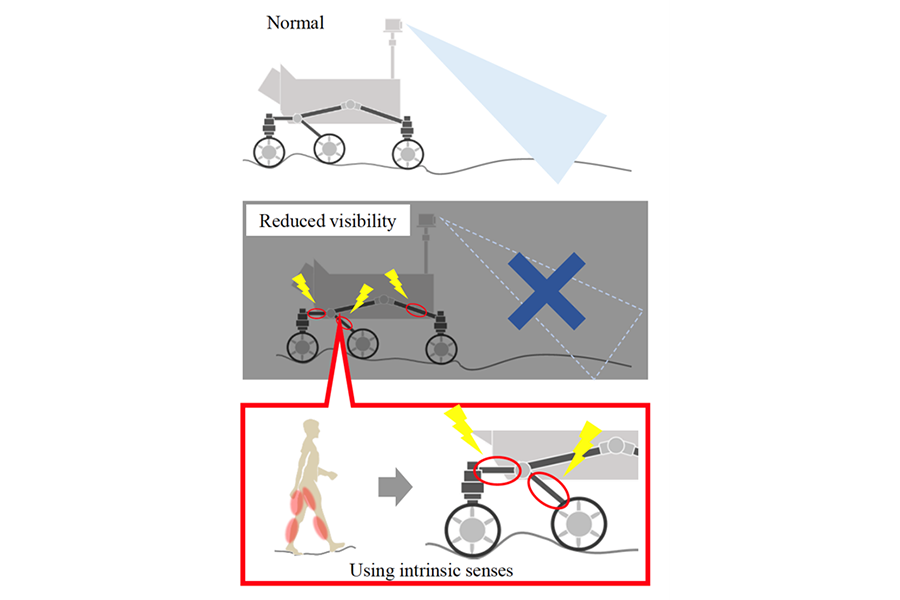
Similar to how human muscles detect the traveling state of the body, the slip condition of rovers can be determined by detecting the deformation of their chassis. This technology can be used to prevent the slipping of rovers. Image Credit: Kojiro Iizuka from Shibaura Insititute of Technology
Unmanned rovers are essential for exploring planets and moons because of the extreme conditions found in these regions. The understanding of these alien worlds has benefited significantly from NASA’s Mars and lunar exploration rovers. The terrain on planetary surfaces is frequently difficult, featuring dunes, craters, and slopes.
More importantly, rover mobility is severely hampered by the regolith, which is a fine powder covering these surfaces. The rovers’ ability to skid on these uneven surfaces can impede their advancement and potentially compromise their missions.
Numerous techniques have been investigated to identify the traveling state or slip condition of rovers, most of which rely on visual data from cameras. These techniques do have some drawbacks, though, as they might not be able to discern between distinct topographical elements, including boulders and loose sand.
The rovers can find a way to solve this issue by learning more about the traction on each wheel. In this manner, the rover could recognize its traveling condition more quickly and adjust its stance to prevent slipping.
This has been made possible by the recent development of a novel system by Professor Kojiro Iizuka of the Department of Machinery and Control Systems of the College of Systems Engineering and Science at Shibaura Institute of Technology (SIT), Japan, and Dr. Kohei Inaba of SIT. This system enables a rover to detect its traveling state by a change in the shape of its chassis.
Remote Sensing published the findings on August 30th, 2023.
Nuclear chain fibers and nuclear bag fibers are unique muscle fibers found in human muscles that aid in the detection of the body’s moving status. The nuclear chain fibers assist in identifying the body’s static posture by detecting changes in muscular tension. Nuclear bag fibers, on the other hand, measure how quickly muscle fibers stretch and assist in determining the body’s dynamic state.
Drawing comparisons with human muscles, the researchers classified the rover’s change in shape, manifested as strain, into two categories: displacement of strain and vibrational shift in strain. They analyzed strain displacement data with nuclear chain fibers and strain velocity with nuclear bag fibers.
According to the nuclear chain fiber study, the forces acting vertically and in the direction of the rover's motion altered with strain. Monitoring strain variations can thus enable the detection of force changes, revealing the rover’s traveling condition.
Furthermore, the researchers discovered that the rate of strain change may successfully evaluate the extent of slippage and consequent changes in the rover’s travel condition using nuclear bag analysis. Using this information, the system can determine the rover’s state in real-time, allowing the rover to make necessary moves to avoid slipping incidents.
The study also underlines the system’s ability to detect environmental impediments such as pebbles and stones, emphasizing its potential to improve rover safety and efficiency.
During rover route planning, the experiences from this study should be considered to ensure that the rovers can travel safely. These findings represent the first step towards incorporating elements of biological functionality in sensing moving objects. We believe that our approach will also be effective for unmanned aerial vehicles and automatic driving in the future.
Kojiro Iizuka, Professor, Department of Machinery and Control Systems, College of Systems Engineering and Science, Shibaura Institute of Technology
Finally, this new study represents a huge step forward in increasing the safety and effectiveness of rover missions, promising advances in the study of other planets and celestial bodies.
Journal Reference
Iizuka, K., et al. (2023) Slip Estimation Using Variation Data of Strain of the Chassis of Lunar Rovers Traveling on Loose Soil. Remote Sensing. doi:10.3390/rs15174270.