The robotic gripper developed by Cornell University now employs air pressure to fling and move objects without arm assistance.
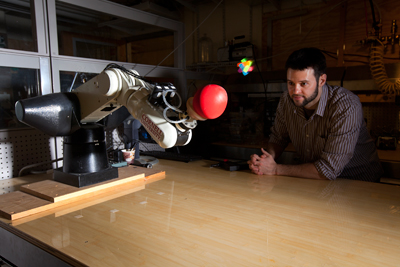 Graduate student John Amend watches the robotic gripper launch a blinking toy through the air
Graduate student John Amend watches the robotic gripper launch a blinking toy through the air
Led by an associate professor of mechanical and aerospace engineering, Hod Lipson, a team of researchers in his lab demonstrated the new capabilities of robotic gripper. It was published online in IEEE Transactions on Robotics on January. 30.
A graduate student at Cornell, John Amend, determined the movement of gripper with a prototype gripper fixed to a robotic arm. The gripper, following the programming is capable of taking the objects and throwing them at various speeds and trajectories. The gripper is a latex balloon with coffee grounds and solidifies due to evacuation of air surrounding the object being gripped. The object is set free as a result of reverse in the air pressure and is released into the air based on the rate of the air pressure.
The physical phenomenon called jamming transition forms the basis of gripper, wherein the coffee grounds, when loosely packed, function like a fluid, and when compressed they solidify into gears.
Robotic grippers have been designed similar to the human hand. Although, other robotic hands use arm motion that offers momentum for throwing the objects, this Cornell gripper throws the object at an optimum rate, without involving the arm movement.
Other advancements to robotic grippers have been planned by integrating the demonstrated principle of a universal gripper into advanced systems such as robotics arms with finger-grippers.
The Defense Advanced Research Projects Agency supported the research.