The jerky motions associated with robots may soon be a thing of the past. The Locomorph project is currently studying robotic movement to help increase their usefulness. They are much inspired by the different aspects of movement available in nature, especially those of resilient three legged dogs.
If a dog can lose a limb and still move with such fluidity and efficiency, then a robot can learn a lot from it as Martin Gross a contributor to the Locomorph project proved. The European Union project saw University of Jena in Germany exploring how to assist planet exploring robots in overcoming physical obstacles and problems in their working environment.
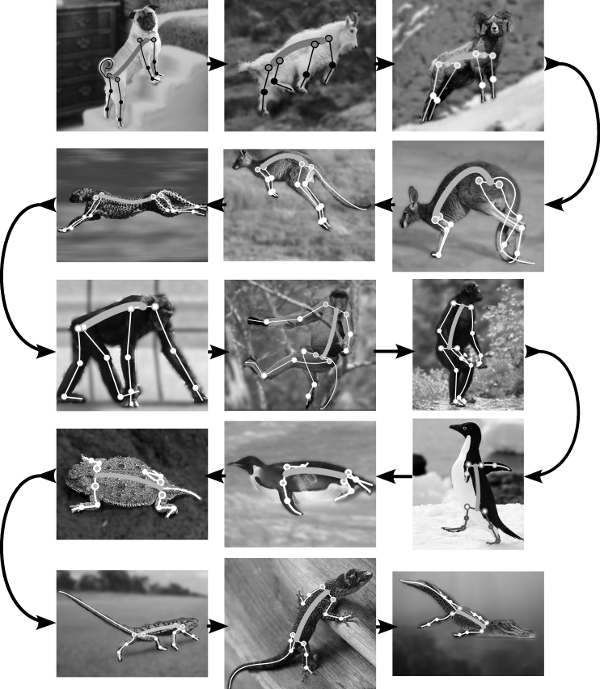 Image Credit: Locomorph Project
Image Credit: Locomorph Project
This was inspired by Martin Gross observing that a dog with a lost limb can still run at the same physical speed as before after adapting to its disability. He then studied a number of dogs with a limb missing to see how weight distribution and other coordination could help the manoeuvrability of a robot.
Locomorph's goal is to push beyond the state of the art in robotic locomotion and movements, by increasing efficiency, robustness, and thus usability in unknown environments.
As robotic research and industry are competing to increase robots' usability towards the highly-in-demand service robotics, advancements in robotic locomotion today would give Europe a significant competitive advantage.
Locomorph combines multidisciplinary approaches from biology, biomechanics, neuroscience, robotics, and embodied intelligence to investigate locomotion and movements in animals and robots, focusing on two concepts: morphology and morphosis.