Oct 9 2015
These findings, reported today, Friday 9th October, in the journal Bioinspiration & Biomechanics, offer a new insight into how animals respond to different terrain, and how robots can learn from them.
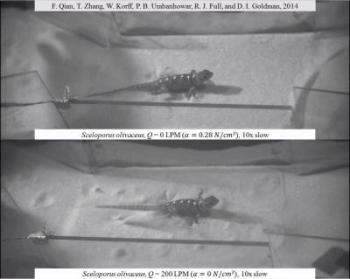 Sceloporus olivaceus is moving through test bed (still from video), (c) Qian, Zhang, Horff, Umbanhowar, Full, Goldman 2014. Credit: (c) Qian, Zhang, Horff, Umbanhowar, Full, Goldman 2014
Sceloporus olivaceus is moving through test bed (still from video), (c) Qian, Zhang, Horff, Umbanhowar, Full, Goldman 2014. Credit: (c) Qian, Zhang, Horff, Umbanhowar, Full, Goldman 2014
The researchers, based at Georgia Institute of Technology, Atlanta, USA, University of California at Berkeley, Berkeley, USA, and Northwestern University, Evanston, USA, developed a test-bed to test the performance of different animals and a hexapedal robot over loose ground.
"It's important to understand the biomechanics and controls of good movement" explains Daniel Goldman, an author on the paper. "If we can find out how these animals solve the problem we can make better robots."
The study marks nearly 10-years of development on the test-bed and locomotion testing and modelling, following efforts by Wyatt Korff and Goldman, who developed the first test-bed whilst at UC Berkeley working with Robert J Full.
"This is like developing the terrestrial equivalent of a wind tunnel in terms of studying movement over different terrain" continues Goldman. "It allows us to look at movement across the ground in a variety of highly controlled states and really see how these animals adjust to different types of terrain."
Five animals were studied in the paper, chosen to reflect different native habitats, body plans and styles of fast movement across loose terrain.
"We deliberately wanted to have a range of specialities", adds Goldman. "We've got sandrunners - but also animals that have to run across sand, forests and in trees - quite different surfaces."
The researchers also used a six legged robot and a computer simulation of the robot to model aspects of the locomotion. Such a first-principles, 'robophysics', approach to understanding movement will be key to robotic design, says Goldman.
"The pioneers of flight looked at different wing designs in a wind tunnel, and now we can do this with robotic design."
"We'd love to be able to explore, for example Mars, really quickly - but the robots we have a relatively heavy and slow" he adds. "One of the major problems is that they're stymied by changes in the ground they're moving on - these results offer an insight in where to develop things next."
The data analysis and simulation efforts were led by two of Goldman's PhD students, Feifei Qian and Tingnan Zhang. The researchers in Goldman's group at Georgia Tech are now investigating how animals such as lizards and snakes move over land with heterogeneities, such as boulders.