I am Daniel Ahmed, an Assistant Professor of Acoustic Robotics for Life Sciences and Healthcare at the Department of Mechanical and Process Engineering at Swiss Federal Institute of Technology Zurich (ETH Zurich), Switzerland. As the head of the Acoustic Robotics Systems Lab, I am developing micro/nanorobots based on ultrasound technology that we expect to be game-changers for applications in medicine.
This is an interesting question. I have always been fascinated by the way aquatic animals swim in water, but have never had the opportunity to study their swimming behavior.
In my academic career, I was always drawn to the study of acoustics. During my doctoral studies in 2011, I was developing lab-on-a-chip devices using acoustically-activated microbubbles. In the microfluidic channel, a microbubble was trapped in a horse-show structure. Ultrasound interacts with these microbubbles to create vortices.
It struck me that if I could fabricate standalone horseshoe structures containing microbubbles, they would be propelled by ultrasound. This was indeed the case, and I was excited. Thus began the journey of artificial microswimmers.
The possibilities are endless, particularly for medical applications, which motivates me even more. Acoustically-activated microswimmers represent a relatively new development with many advantages, and I hope to be at the forefront of this field.
© Cornel Dillinger/ETH Zurich
Why do microrobots hold so much potential in the biomedical sector?
I believe our innovative microrobotics systems will support novel strategies for targeted drug delivery, investigating glioblastoma and various brain diseases.
Our technology will have a significant impact as a foundation for advancements in brain research and vasculature biology, as well as in furthering our understanding of diseases and the development of relevant treatments.
The combination of manipulation and drug delivery capabilities means it can also potentially see a use for conditions such as stroke and heart attack.
Real-time imaging of micron-sized robots is a challenge. Ultrasound can generate real-time images, but visualizing things on the micron scale is still difficult. Another challenge is that the vasculature network of a mouse—or human—brain, is super complicated.
Could you give a brief overview of your research objectives to our readers?
My lab, Acoustic Robotics Systems Lab (ARSL), focuses on developing new wireless micro/nanorobots using acoustic technology. The objectives of our research include the following:
- Address the fundamental challenges associated with using micro/nanorobots within living systems.
- Develop ultrasound technology to manipulate drugs inside the body of animals to treat diseases.
- Develop visualization, tracking, and reinforcement learning methods to enable our microrobots to manipulate the various vascular structures of mice.
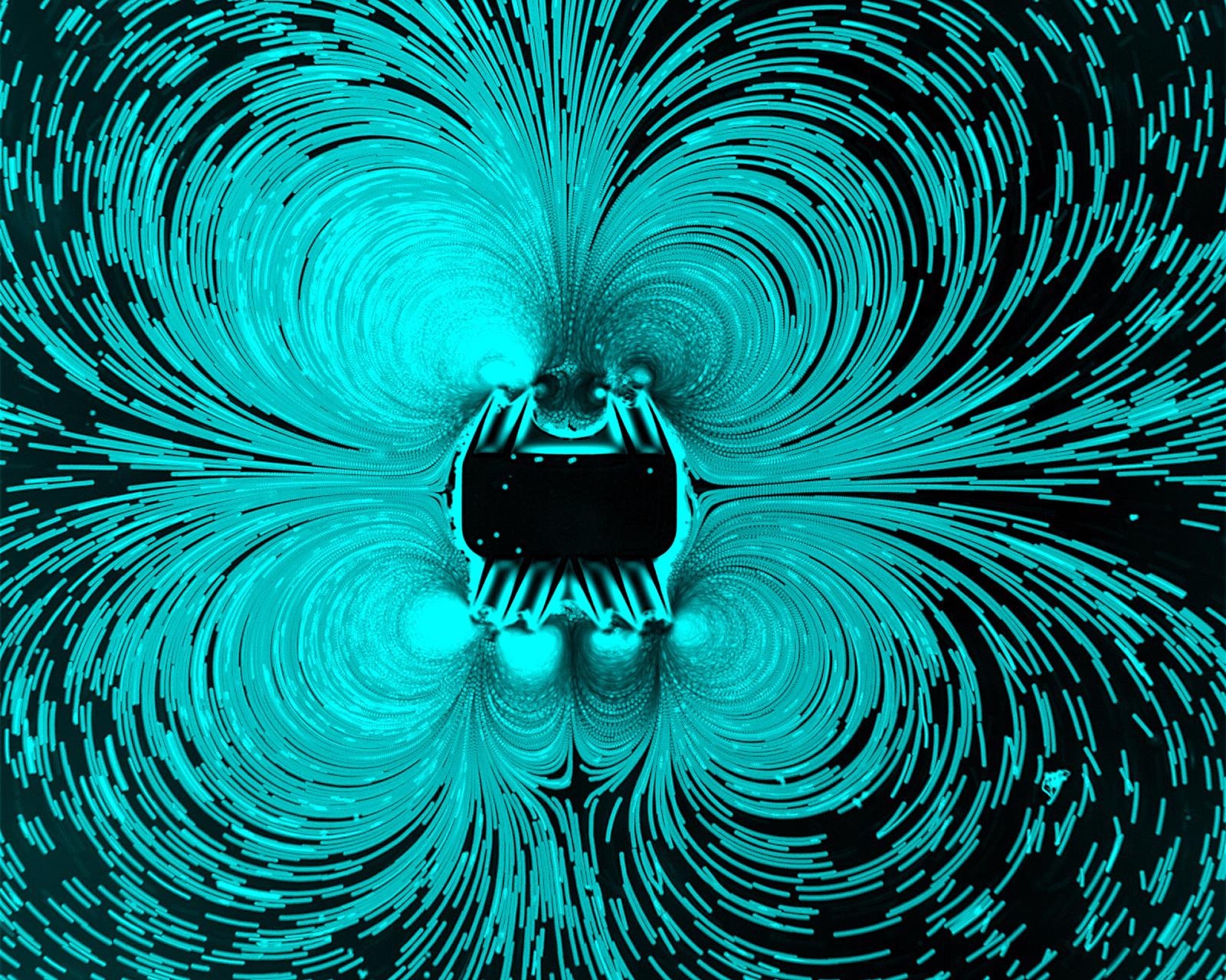
This microrobot mimics a starfish larva
This microrobot mimics a starfish larva. Video credit: ETH Zurich/YouTube.com
The flow patterns between the starfish larva and microrobots are strikingly similar. Did you expect such a high level of mimicry, and what aspects of the microrobot design aided this development?
Initially, Cornel Dillinger (my doctoral student/first-author) and I did not expect such high levels of agreement. Natural cilia and acoustic cilia are different in several ways. Cilia on the surface of starfish larvae beat in a non-reciprocal manner with a frequency of 6Hz, whereas acoustically-activated synthetic cilia oscillate back and forth at frequencies at least three orders of magnitude higher.
Despite the very different dynamics, we still encountered similar microstreaming, which was unexpected.
Our attention was drawn to the configuration of multiple cilia arranged in ciliary bands. Inspired by the starfish larva, we arranged ciliary arrays in a "+" and "-"configuration. Based on the arrangement of the ciliary arrays, a fluid source or sink can be developed when the soft microstructures are activated with ultrasound.
This discovery initiated the research project leading to the creation of the starfish-inspired microrobot and the trapping mechanism, which is also derived from starfish larvae.
The use of ultrasound to control, propel and view the movement of these microrobots is particularly fascinating. Are there any other applications other than the medical sector where this technology could be applied?
Microfluidics or lab-on-a-chip systems are appealing because of their ability to control liquids precisely, use small quantities of expensive chemicals and biospecimens, separate particles with high resolution and sensitivity, and are portable and cost-effective.
The manipulation and separation of particles and cells are required in many applications in biology and medicine for drug screening and therapeutics. Presently, there are many technologies available to separate particles based on filtration, centrifugation, acoustics, optics, and electrophoresis.
Using acoustic waves for particle manipulation is attractive because it facilitates the manipulation of particles independent of their optical, magnetic, or electrical properties in a simple, precise, and biocompatible manner.
Our goal is to develop a new design for the lab-on-chip system for automatic pumping and label-free manipulation and separation of cells and particles for portable diagnostics.
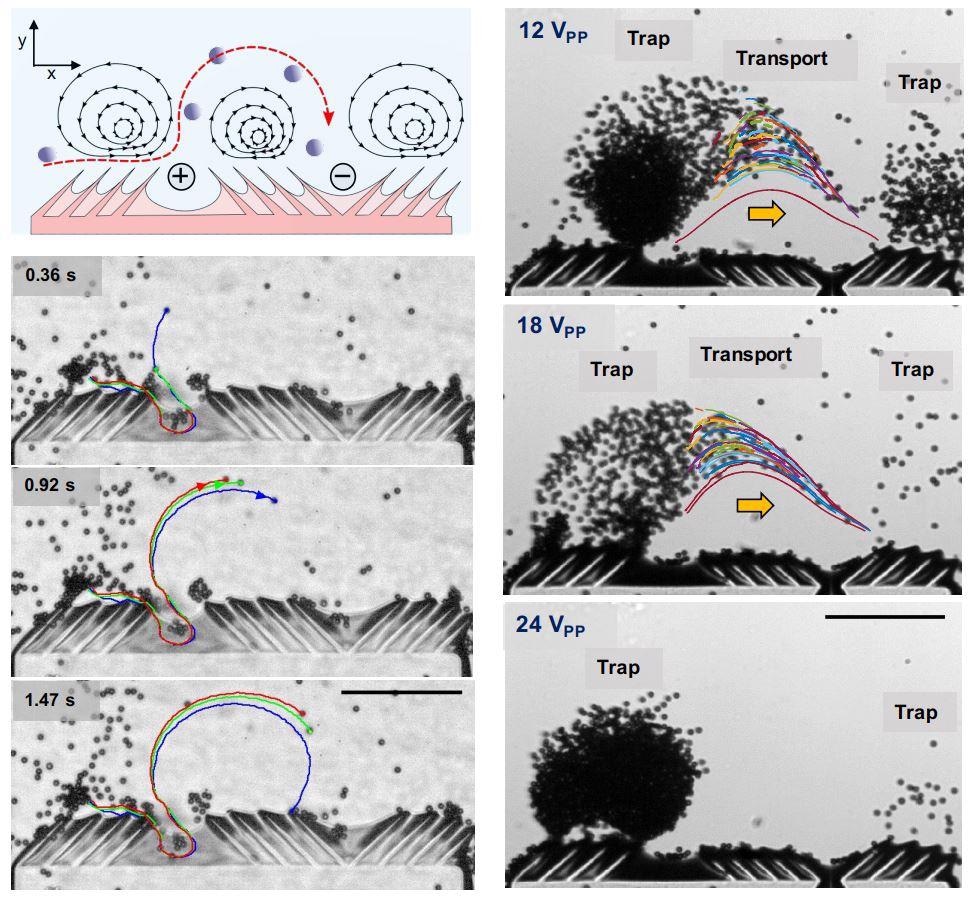
Schematic of a bioinspired trapping mechanism consisting of a + ciliary band adjacent to a – ciliary band (left). Acoustic power-dependent transport and trapping; transport and trapping of 10 µm particles (colored trajectories) with maximum transport efficiencies of microparticles traveling from + to – ciliary band were achieved at a 12 and b 18 volts peak-to-peak (VPP) (right). © Dillinger, C., Nama, N., and D, Ahmed. (2021)
What are the benefits of using acoustically activated cilia over conventional external fields to control their movement?
There are numerous advantages compared to conventional external fields in controlling their movement. We can activate the cilia at high frequency, resulting in faster particle transport in liquid. Furthermore, the fabrication is very straightforward and does not require magnetic particles to activate the cilia magnetically, i.e., these systems are biocompatible.
By using a 2-D photopolymerization process to print the microstructures, thousands of ciliated systems can be fabricated quickly and efficiently. Eventually, the inexpensive actuation principle using ultrasound makes these microrobotic systems accessible for almost everybody and, therefore, can lead to more innovation.
How might the external environment alter how these microrobots are controlled? For example, would aspects such as viscosity alter their movement or control?
This is an excellent question that requires some fundamental investigation. The acoustic streaming produced by the ciliary bands of starfish in simple Newtonian fluids, such as water, scales quadratically with input voltage. We need to examine the scaling relationship of swimming speed in various non-Newtonian fluids, such as blood and synovial fluid.
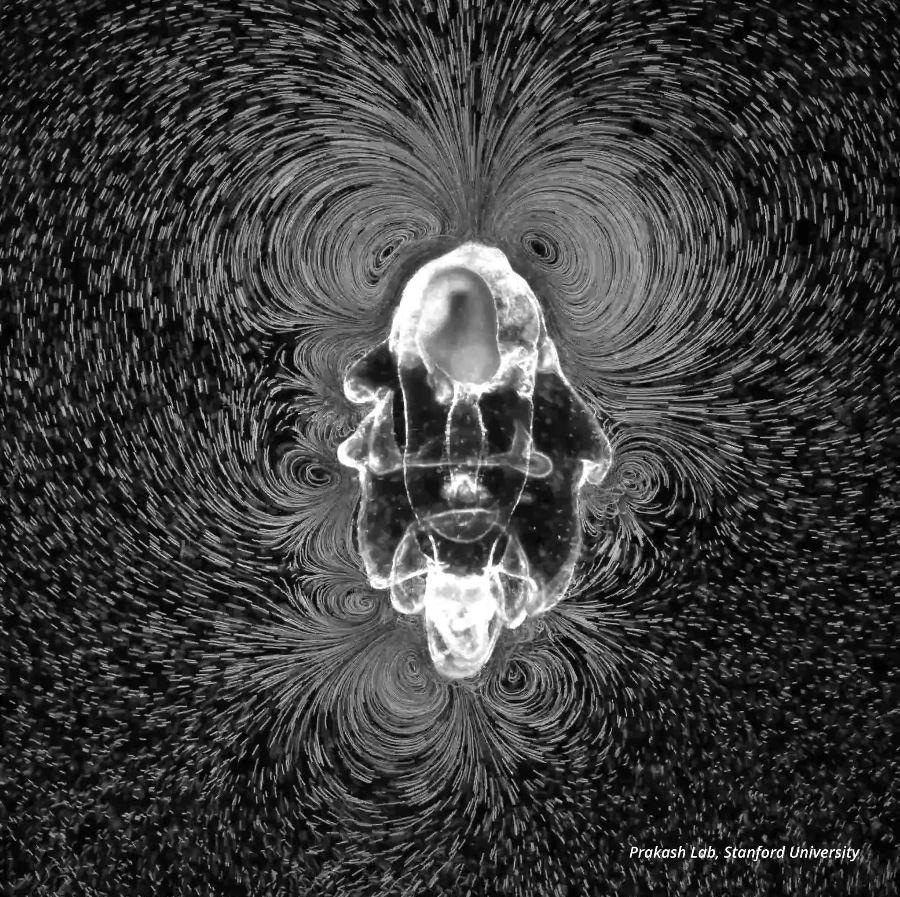
© Prakash Lab/Standford University
The design of the microrobots is particularly suited to their applications. Could any components of this larva-inspired technology be applied to robots of a larger size?
Manipulating objects at the microscale presents a fundamental challenge since inertia does not exist. In the case of large-scale robots, this will not be an issue. Nevertheless, some of the components of our study can be adapted for use with large-scale robots. We could, for example, integrate the trapping mechanism into large-scale aquatic robots.
Bioinspired robots have become a prominent research and development area over the past few years. How do you think the next 30 years of this field will progress?
A microrobot will have a significant impact on the health sector, particularly in the treatment of diseases.
The ARSL is exploring many of the fundamental challenges associated with microrobots, especially when exposed to flow conditions similar to those in the vasculature. With the advent of artificial intelligence, I anticipate that navigation of these microrobots will become much more sophisticated, allowing them to potentially target diseases effectively and promptly.
Upon reaching a site, these swimmers can release drugs very locally. My belief is that microrobots could be used to treat patients suffering from heart disease or stroke. It is likely that we will witness a revolution in medicine regarding the treatment of disease, and we would not need to wait 30 years.
How Bioinspired Ultrasound Microrobots revolutionize Medicine | Daniel Ahmed
How Bioinspired Ultrasound Microrobots revolutionize Medicine | Daniel Ahmed. Video Credit: Falling Walls Foundation/YouTube.com
What aspect of this research do you find particularly exciting?
I have so many reasons to be excited about my lab and research. In general, I would say that we conduct both fundamental and application-oriented research. We find it very exciting to explore new physical phenomena and to adapt technology to a final application. Moreover, it is our aim that our research is also applied and, therefore, we can give something back to society. ETH and my lab house an incredibly talented group of students and researchers, and I enjoy interacting with and mentoring the next generation of leaders.
Where can our readers go to stay up to date with this research?
The homepage for my lab can be accessed here. A list of related research is shown below with our most recent paper highlighted at the top:
For more information on the project as a whole please see here.
About Dr. Daniel Ahmed
 Daniel Ahmed is an Assistant Professor of Acoustic Robotics for Life Sciences and Healthcare in the Department of Mechanical and Process Engineering at ETH Zurich (Switzerland).
Daniel Ahmed is an Assistant Professor of Acoustic Robotics for Life Sciences and Healthcare in the Department of Mechanical and Process Engineering at ETH Zurich (Switzerland).
Currently, he leads the newly-built Acoustic Robotics Systems Lab. Daniel Ahmed holds Bachelor's, Master's, and Doctoral degrees in Engineering Science and Mechanics from Pennsylvania State University (U.S.).
He was a postdoctoral researcher and a senior scientist in the Department of Mechanical and Process Engineering (D-MAVT) at ETH Zurich. Daniel Ahmed's research focuses on utilizing acoustics in combination with micro/nanorobotic and microfluidic systems with the aim of developing technologies at the interface of biotechnology, biomedical engineering, and medicine. During his doctoral studies at Pennsylvania State University, Daniel Ahmed initiated and led a microbubble-based acoustofluidics group to develop new microfluidic and microrobotic systems.
His dissertation established a new concept in micro-actuation and soft microrobots, showing that such robots could be controlled wirelessly by an acoustic field. During his research at ETH Zurich, Daniel combined multiple actuation modalities to develop new micro/nanorobotics systems. He was awarded a European Research Council (ERC) Starting Grant on Acousto-Magnetic Micro/Nanorobots for Biomedical Applications (SONOBOTS) in 2019.
Daniel Ahmed has published 31 peer-reviewed journal articles and has published 14 conference proceedings. He has been selected as one of the ten winners in Falling Walls Science Breakthroughs of the Year 2021 in Engineering and Technology.
Disclaimer: The views expressed here are those of the interviewee and do not necessarily represent the views of AZoM.com Limited (T/A) AZoNetwork, the owner and operator of this website. This disclaimer forms part of the Terms and Conditions of use of this website.