Rescuers are unable to approach the confined space due to the complex environment, therefore they must rely on robots to seek and rescue. Furthermore, the robot can calculate its own location using the map it has created and help trapped people to safety after the accident.
Although a corresponding positioning system is installed beneath the mine, the positioning equipment is destroyed, and the exact positioning functionality cannot be accomplished when the mine collapses. As a result, robots’ simultaneous localization and mapping (SLAM) plays an important part in mine recovery.
The SLAM concept is presented as a solution to the difficulty of robot positioning and mapping at the same time. The Kalman filter-based EKF-SLAM and particle filter-based FastSLAM algorithms are examples of traditional SLAM algorithms that are based on filtering theory.
This study, published in the MDPI journal Sensors, uses the FastSLAM2.0 algorithm to divide the robot positioning and mapping into a moving part and a conditional map part to decrease the sample space to solve the problem of low efficiency of mine rescue robot positioning and mapping.
Methodology
SLAM means that the robot decides its trajectory in a location environment using its own sensors while also creating an environmental map. The SLAM challenge for robots can be thought of as a probability issue. Figure 1 depicts the SLAM problem as a dynamic Bayesian network.
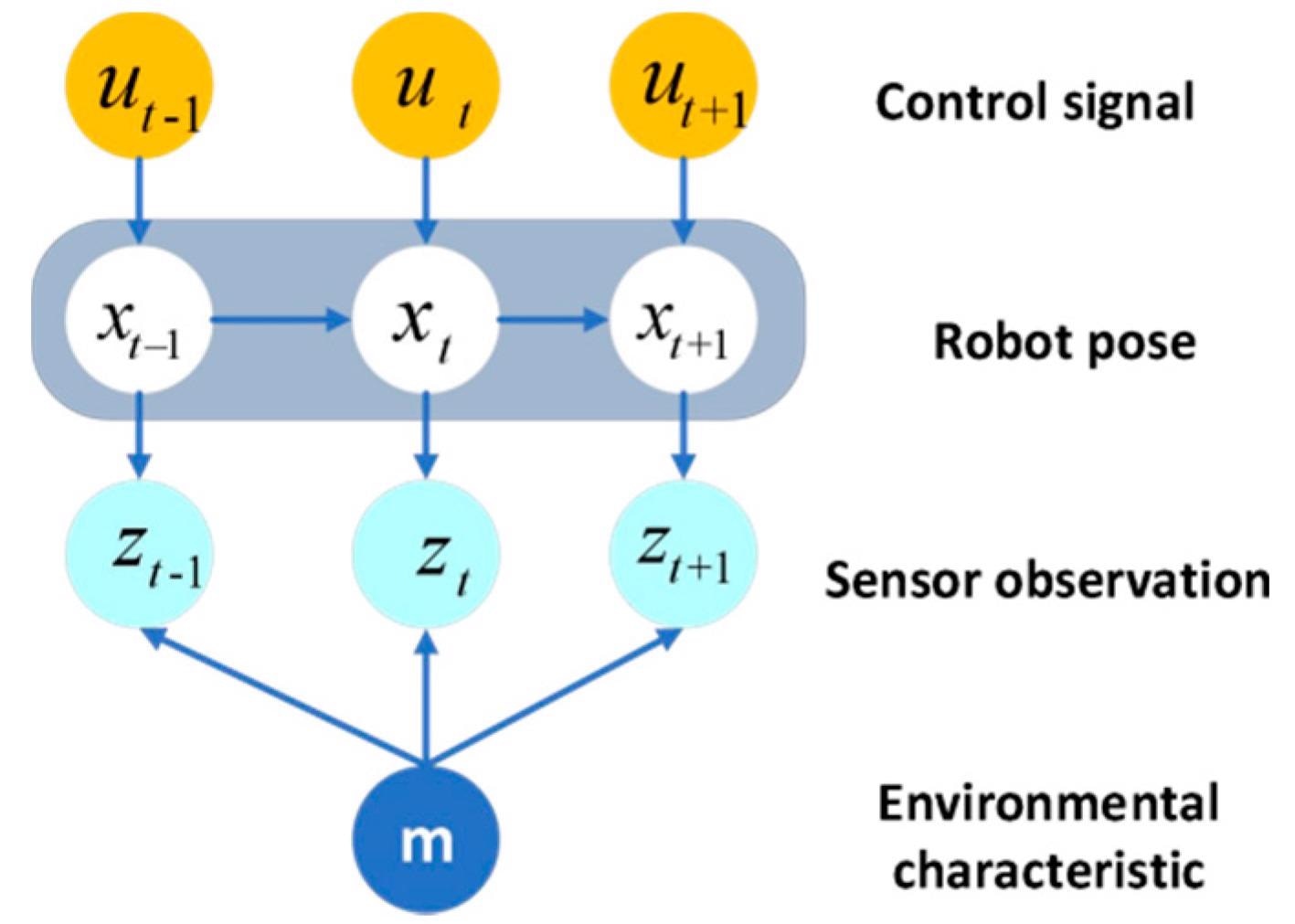
Figure 1. Dynamic Bayesian networks for SLAM. Image Credit: Zhu, et al., 2022
The Lion Swarm Optimization Algorithm (LSO) is a new technique for solving the objective function’s global optimal control problem. To tackle the challenge, this technique completely matches the lion’s foraging behavior, migration, and population change.
Various options for improvement were presented by the researchers. One option was to alter the particle set using the global optimal value technique to prevent slipping into the local optimal. The other is to increase the algorithm’s filtering performance by optimizing or replacing the particle re-sampling technique, which will reduce particle weight degradation and diversity loss.
Simultaneously, the lion swarm algorithm’s survival strategies for all types of individuals were refined and optimized. The capacity of particles to optimize was greatly boosted when the Lion King position updating and the cub following method were improved.
A genetic algorithm was used to optimize the lioness hunting process to prevent the improved algorithm’s local ideal scenario. Moreover, the loss of particle variety and deterioration of particle weight has been shown to increase the robot’s positioning accuracy. Figure 2 illustrates the modified algorithm flow chart.
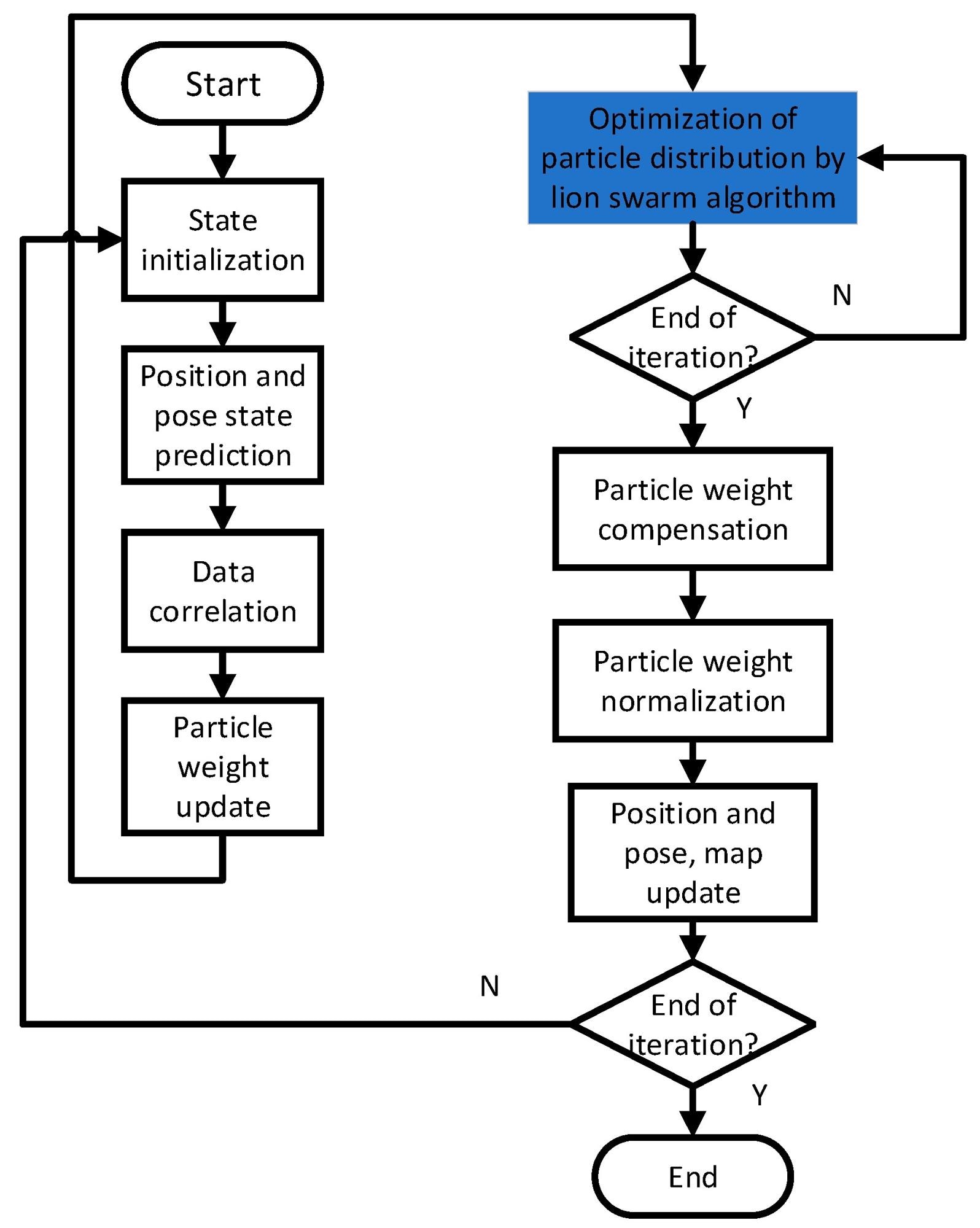
Figure 2. Flowchart of improved algorithm. Image Credit: Zhu, et al., 2022
Results and Discussion
Table 1 shows the mobile robot’s motion characteristics and noise parameters. The robot’s control noise and the observation noise are both three-dimensional. The speed noise of the robot is demonstrated in the following table as noise in the direction of the movement process of the robot, which is made up of x-axis noise and y-axis noise.
Table 1. Motion parameters and noise parameters of mobile robots. Source: Zhu, et al., 2022
| Parameter |
Numerical Value |
Noise Parameters |
Numerical Value |
| Robot speed |
3 m/s |
Motion noise |
0.3 m/s
1.5° |
| Max steering angle |
10° |
| Maxi steering angular speed |
15°/s |
Observation noise |
0.1 m/s
1° |
| Wheel spacing |
4 m |
| Sampling time interval |
0.025 s |
|
|
Next, simulate robot mapping and localization by setting up the working environment as shown in Figure 3, which includes 17 heading points, 35 road marking points, and a mobile robot movement range of 100 m × 80 m. The mobile robot moves counterclockwise, starting at the origin of the coordinates (red point in Figure 3).
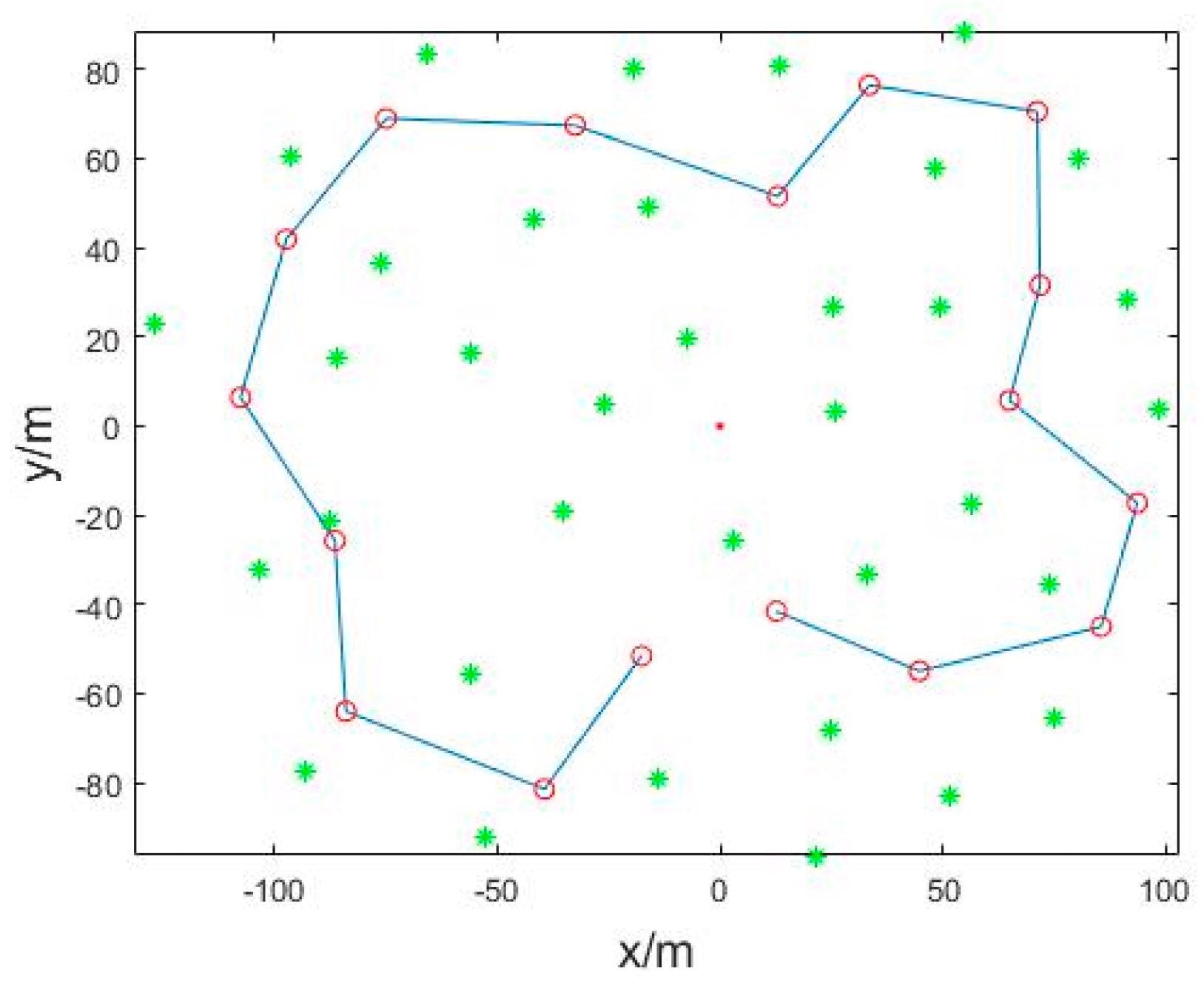
Figure 3. Simulation Environment. Image Credit: Zhu, et al., 2022
When there are 20, 50, 80, or 100 particles, the RMSE of the robot position estimate and the road sign estimation were calculated using the GFA-FastSLAM2.0 algorithm, FastSLAM2.0 algorithm, and LSO-FastSLAM2.0 algorithm in 20 experiments, and the average value was determined. Table 2 shows the results of the experiments.
Table 2. Improved algorithm validity proof. Source: Zhu, et al., 2022
| Number of Particles |
Algorithm |
Mean Localization Accuracy Error/M |
RMSE of Road Sign Estimation (m) |
| 20 |
FastSLAM2.0 |
3.0535 |
4.1399 |
| GFA-FastSLAM2.0 |
2.9060 |
3.3545 |
| LSO-FastSLAM2.0 |
2.3025 |
2.2837 |
| 50 |
FastSLAM2.0 |
2.7718 |
3.2106 |
| GFA-FastSLAM2.0 |
2.3629 |
2.5990 |
| LSO-FastSLAM2.0 |
2.0470 |
2.2837 |
| 80 |
FastSLAM2.0 |
2.6843 |
2.9199 |
| GFA-FastSLAM2.0 |
1.7504 |
1.9072 |
| LSO-FastSLAM2.0 |
1.2745 |
1.3762 |
| 100 |
FastSLAM2.0 |
2.5907 |
2.8538 |
| GFA-FastSLAM2.0 |
1.3693 |
1.6422 |
| LSO-FastSLAM2.0 |
1.1745 |
1.3279 |
The effective particle number of the algorithm suggested in this paper is higher than the other two algorithms, as seen in Figure 4.
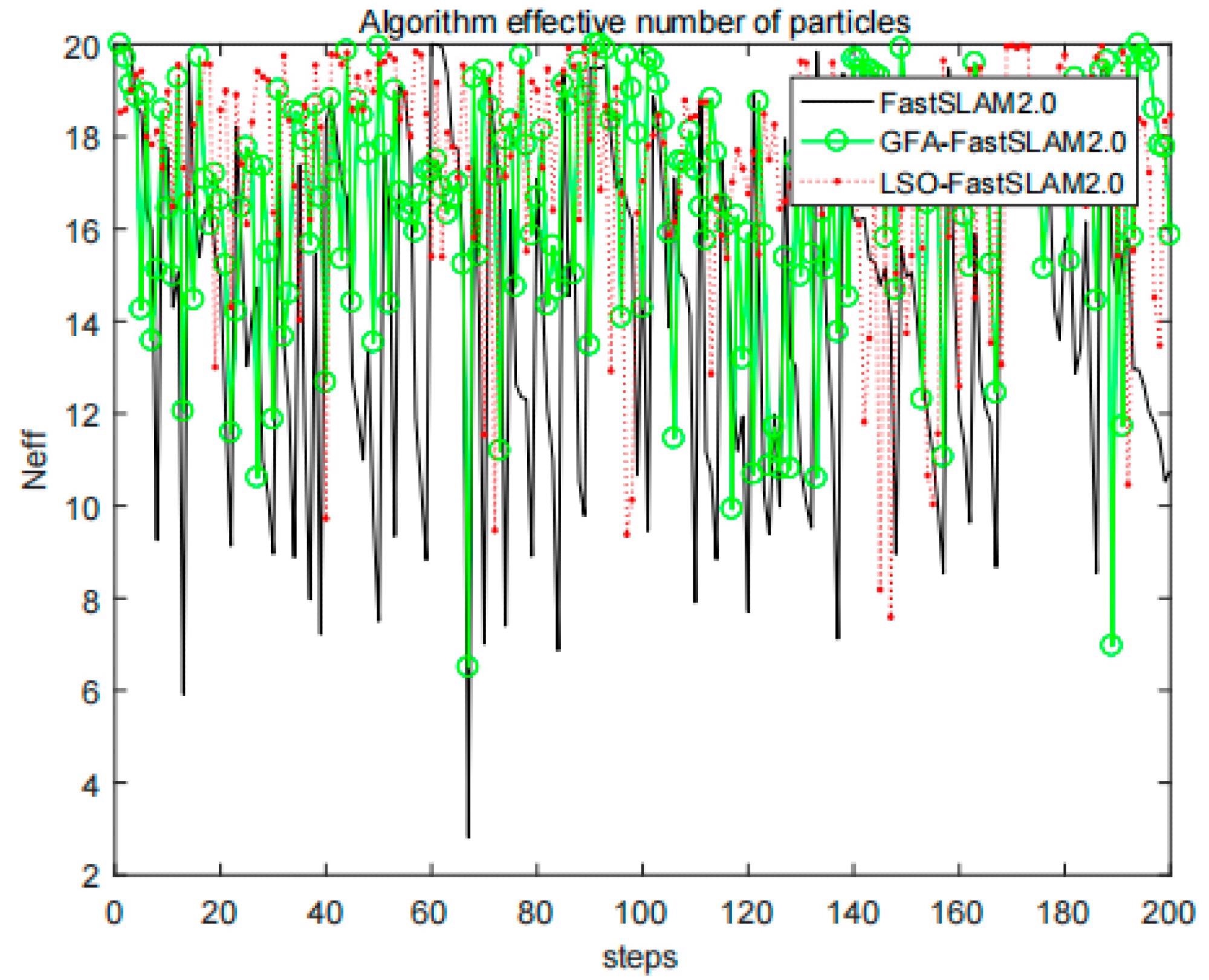
Figure 4. Effective particle number comparison. Image Credit: Zhu, et al., 2022
The green and red triangles in Figure 5 depict the robot’s actual and expected positions, while the yellow lines indicate the robot’s perception of the road markers. The improved algorithm suggested in this paper has the best degree of coincidence with the real trajectory, followed by the GFA-FastSlam2.0 algorithm, and the FastSlam2.0 algorithm has the worst impact, as shown in Figure 5.
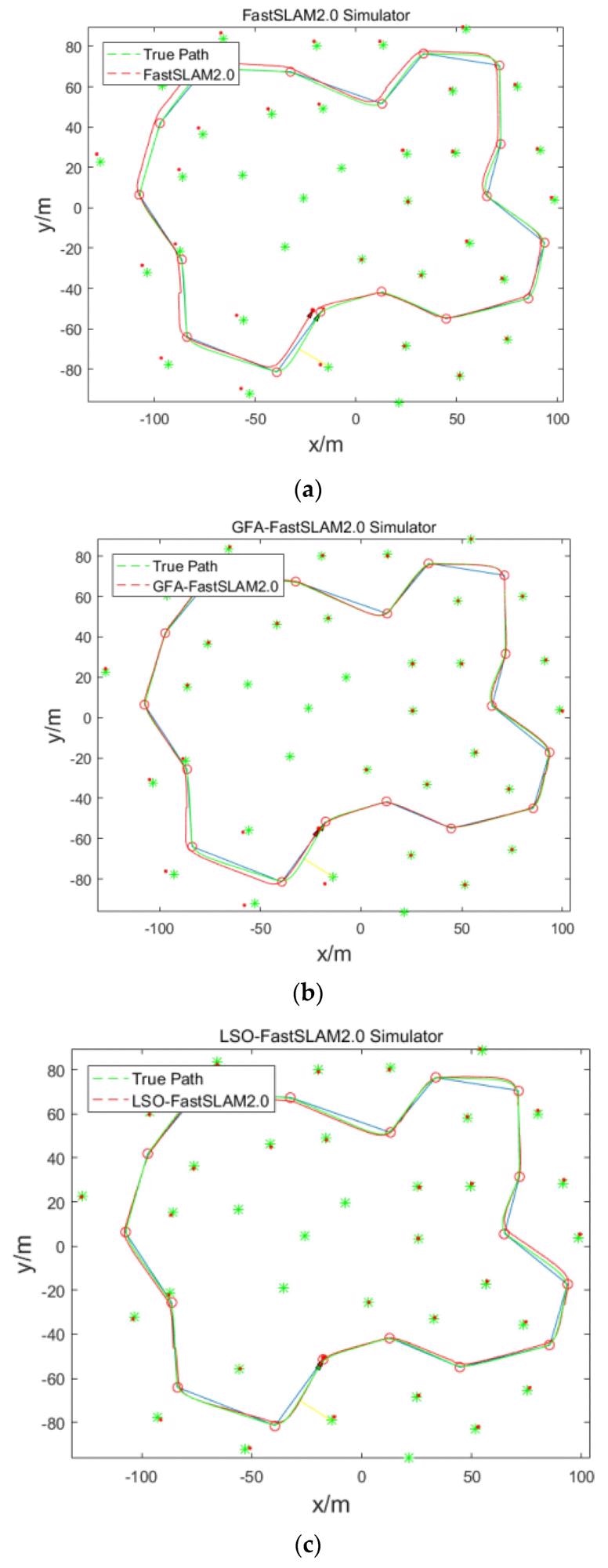
Figure 5. The algorithm real trajectory: (a) FastSLAM2.0 Simulation Result; (b) GFA-FastSLAM2.0 Simulation Result; (c) LSO-FastSLAM2.0 Simulation Result. Image Credit: Zhu, et al., 2022
Figure 6 shows that the algorithm proposed in this paper has the lowest error and is reasonably constant, whereas the positioning accuracy error of the classic FastSLAM2.0 algorithm keeps increasing as the running time rises, while the positioning accuracy error of the classic FastSLAM2.0 algorithm increases as the running time intensifies.
The cause of this issue is that as the iterative method progresses, the particles get substantially damaged and their diversity is destroyed, resulting in poorer robot placement accuracy.
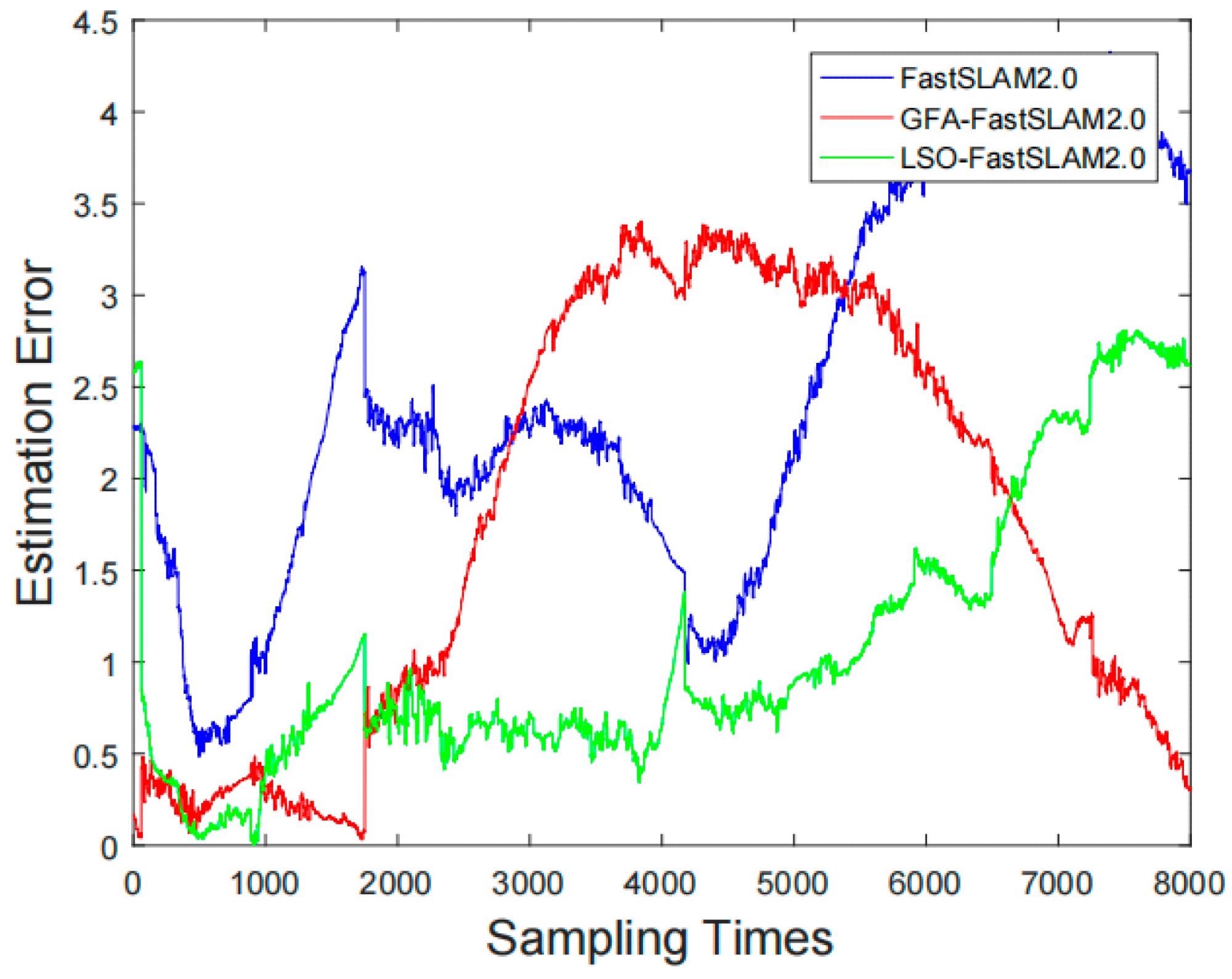
Figure 6. Comparison Chart of Robot Localization Accuracy Error. Image Credit: Zhu, et al., 2022
When comparing the average error and variance of the three algorithms’ positioning accuracy, it is clear that the modified algorithm has enhanced the robot positioning performance, as shown in Table 3 below.
Table 3. Comparison of mean error and variance of localization accuracy of three algorithms. Source: Zhu, et al., 2022
| Algorithm |
Mean Localization Accuracy Error/m |
Variance of Localization Accuracy Error |
| FastSLAM2.0 |
2.7718 |
1.6403 |
| GFA-FastSLAM2.0 |
1.4036 |
0.9059 |
| LSO-FastSLAM2.0 |
1.1867 |
0.2519 |
Researchers examined the RMSE of the x-axis, y-axis, and road signs, respectively, to validate the modest improvement in robot localization and mapping accuracy, as shown in Table 4.
Table 4. Comparison of RMSE of three algorithms: x-axis, y-axis and road sign estimation. Source: Zhu, et al., 2022
| Algorithm |
RMSE of x-Axis (m) |
RMSE of y-Axis (m) |
RMSE of Road Sign Estimation (m) |
| FastSLAM2.0 |
2.0447 |
2.2676 |
2.9871 |
| GFA-FastSLAM2.0 |
1.6015 |
1.1018 |
1.5841 |
| LSO-FastSLAM2.0 |
0.6932 |
1.0518 |
1.3383 |
In the x-axis, y-axis, and road sign estimation, the improved algorithm suggested in this paper outperforms FastSLAM2.0 and GFA-FastSLAM2.0 algorithms, as shown in Table 4.
Conclusion
This research provides an improved FastSLAM method based on the lion swarm optimization technique to enhance the precision of mine rescue robot positioning and mapping.
The lion swarm optimization algorithm improves the accuracy of robot positioning and mapping by optimizing the particle distribution after sampling. This solves particle weight degradation and loss of particle diversity in the FastSLAM algorithm.
The revised algorithm will be used to test the practicality of the method on mine rescue robots in the coming years.
Journal Reference:
Zhu, D., Ma, Y., Wang, M., Yang, J., Yin, Y., Liu, S. (2022) LSO-FastSLAM: A New Algorithm to Improve the Accuracy of Localization and Mapping for Rescue Robots. Sensors, 22(3), p. 1297. Available Online: https://www.mdpi.com/1424-8220/22/3/1297/htm.
References and Further Reading
- Hua, Z & Shaoze, Y (2020) Research and experiment of a new type of coal mine rescue robot. Journal of China Coal Society, 45, pp. 2170–2181.
- Qian, S. H., et al. (2006) Research status of the disaster rescue robot and its applications to the mine rescue. Robot, 28, pp. 350–354.
- Ge, S., et al. (2020) Classification system and key technology of coal mine robot. Journal of China Coal Society, 45, pp. 455–463.
- Durrant, W., et al. (2006) Simultaneous localization and mapping (SLAM): Part II. IEEE Robotics & Automation Magazine, 13(3), pp. 99–110. doi.org/10.1109/MRA.2006.1678144.
- Guivant, J E & Nebot, E M (2001) Optimization of the simultaneous localization and map-building algorithm for real-time implementation. IEEE Transactions on Robotics and Automation, 17(3), pp. 242–257. doi.org/10.1109/70.938382.
- Agarwal, S., et al. (2017) RFM-SLAM: Exploiting relative feature measurements to separate orientation and position estimation in SLAM. In: IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017. doi.org/10.1109/ICRA.2017.7989746.
- Chen, H &Yu, P (2019) Application of Laser SLAM Technology in Backpack Indoor Mobile Measurement System. IOP Conference Series: Earth and Environmental Science, 237(3), p. 032026. doi.org/10.1088/1755-1315/237/3/032026.
- Nemra, A & Aouf, N (2011) Robust cooperative UAV Visual SLAM. In: IEEE International Conference on Cybernetic Intelligent Systems, Hangzhou, China, pp. 26–27. doi.org/10.1109/UKRICIS.2010.5898125.
- Lina, M., et al. (2008) Divide and Conquer: EKF SLAM in 0(n). IEEE Transactions on Robotics, 24(5), pp. 1107–1120. doi.org/10.1109/TRO.2008.2004639.
- Montemerlo, M., et al. (2013) FastSLAM: A Factored Solution to Simultaneous Mapping and Localization. In: National Conference on Artificial Intelligence, Bellevue, WA, USA, 14–18 July 2013.
- Cadena, C., et al. (2016) Past, Present, and Future of Simultaneous Localization and Mapping: Toward the Robust-Perception Age. IEEE Transactions on Robotics, 32(6), pp. 1309–1332. doi.org/10.1109/TRO.2016.2624754.
- Havangi, R (2016) Improved FastSLAM2.0 using ANFIS and PSO. Automatika, 57(4), pp. 996–1006. doi.org/10.7305/automatika.2017.12.1627.
- Zhang, Y., et al. (2016) SLAM algorithm with Gaussian distributed resampling Rao-Blackwellized particle filter. Control and Decision, 31, pp. 2299–2304.
- Roy, S S &Pratihar, D K (2013) Dynamic modeling, stability and energy consumption analysis of a realistic six-legged walking robot. Robotics and Computer-Integrated Manufacturing, 29(2), pp. 400–416. doi.org/10.1016/j.rcim.2012.09.010.
- Lv, T & Feng, M (2016) A FastSLAM 2.0 algorithm based on FC&ASD-PSO. Robotica, 35, pp. 1–21. doi.org/10.1017/S0263574716000527.
- Ankişhan, H., et al. (2016) Square root central difference-basedFastSLAM approach improved by differential evolution. Turkish Journal of Electrical Engineering & Computer Sciences, 24, pp. 994–1013. Available at: https://www.tubitak.gov.tr/en.
- Kim, C., et al. (2008) Unscented FastSLAM: A Robust and Efficient Solution to the SLAM Problem. IEEE Transactions on Robotics, 24(6), pp. 808–820.doi.org/10.1109/TRO.2008.924946
- He, B., et al. (2015) Autonomous navigation based on unscented-FastSLAM using particle swarm optimization for autonomous underwater vehicles. Measurement, 71, pp. 89–101. doi.org/10.1016/j.measurement.2015.02.026.
- Kurt-Yavuz, Z &Yavuz, S (2012) A comparison of EKF, UKF, FastSLAM2.0, and UKF-based FastSLAM Algorithms. In: IEEE International Conference on Intelligent Engineering Systems, Lisbon, Portugal, 13–15 June 2012. doi.org/10.1109/INES.2012.6249866.
- Darwish, S M (2016) Combining firefly algorithm and Bayesian classifier: New direction for automatic multilabel image annotation. IET Image Processing, 10(10), pp. 763–772. doi.org/10.1049/iet-ipr.2015.0492.
- Do, K D (2020) Stability in probability and inverse optimal control of evolution systems driven by Levy processes. IEEE/CAA Journal of AutomaticaSinica, 7(2), pp. 405–419. doi.org/10.1109/JAS.2020.1003036
- Anwar, N & Deng, H (2015) Ant Colony Optimization based multicast routing algorithm for mobile ad hoc networks. In: Advances in Wireless & Optical Communications, Riga, Latvia, 5–6 November. doi.org/10.1109/RTUWO.2015.7365721
- Kharwar, P K &Verma, R K (2020) Exploration of nature inspired grey wolf algorithm and grey theory in machining of multiwall carbon nanotube/polymer nanocomposites. Engineering with Computers, pp. 1–22. doi.org/10.1007/s00366-020-01103-x.
- Sengupta, S., et al. (2012) Energy-Efficient Differentiated Coverage of Dynamic Objects Using an Improved Evolutionary Multi-Objective Optimization Algorithm with Fuzzy-Dominance. In:2012 IEEE Congress on Evolutionary Computation, Brisbane, Australia, 10–15 June 2012. doi.org/10.1109/CEC.2012.6256541.
- Lee, H. C., et al. (2012) PSO-FastSLAM: An Improved FastSLAM Framework Using Particle Swarm Optimization. In: 2009 IEEE International Conference on Systems, Man and Cybernetics, San Antonio, TX, USA, 11–14 October 2009. doi.org/10.1109/ICSMC.2009.5346572
- Haydar, A., et al. (2013) Square Root Unscented Based FastSlam Optimized by Particle Swarm Optimization Passive Congregation. In:IEEE International Conference on Mechatronics and Automation, Takamatsu, Japan, 4–7 August 2013. doi.org/10.1109/ICMA.2013.6617963
- Lv, T. Z., et al. (2018) An Improved FastSLAM Algorithm Based on Revised Genetic Resampling and SR-UPF. International Journal of Automation and Computing, 15, pp. 325–334. doi.org/10.1007/s11633-016-1050-y
- Cui, J., et al. (2019) Research on simultaneous localization and mapping for AUV by an improved method: Variance reduction FastSLAM with simulated annealing. Defence Technology, 16(3), pp. 651–661. doi.org/10.1016/j.dt.2019.10.004
- Tian, M. C., et al. (2017) Novel target tracking method based on firefly algorithm optimized particle filter. Control and Decision, 32, pp. 1758–1766.
- Zhang, Q. M., et al. (2017) New Swarm Intelligent Algorithms: Lions Algorithm. Computer Science, 45(6A), pp. 114–116. Available at: : http://www.jsjkx.com/EN/Y2018/V45/I6A/114
- Montemerlo, M. S., et al. (2003) FastSLAM 2.0: An improved particle filtering algorithm for simultaneous localization and mapping that provably converges. Proceedings of the 18th international joint conference on Artificial intelligence, 133, pp. 1151–1156. doi/10.5555/1630659.1630824
- Yang, X., et al. (2019) Research on GRNN-based Particle Filter Algorithm. In:2019IEEE 3rd Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Chengdu, China, 15–17 March 2019. doi.org/10.1109/ITNEC.2019.8729218
- Chen, S. M., et al. (2018) Unscented Fast SLAM2.0 algorithm based on gravitational field optimization. Control Theory and Applications, 35, pp. 1186–1193.