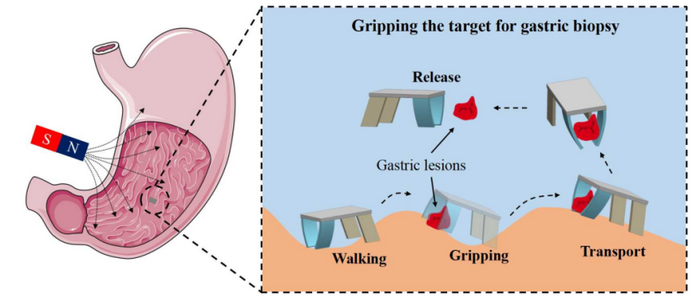
Schematic diagram of the bionic walking and gripping of the magnetically actuated quadruped soft microrobot toward gastric biopsy. Image Credit: Chenyang Huang, Shenzhen Institute of Advanced Technology, Chinese Academy of Sciences
Researchers uncovered the soft microrobot’s multimodal magnetic field locomotion control and also its capability to transport and capture micro-objects.
The newly released study, which was published in Cyborg and Bionic System, describes how to build a microrobot and how to magnetize it, explains how to maneuver a microrobot and transport cargo, and shows a microrobot moving several microbeads to a target position.
Untethered microrobots have drawn a significant amount of attention because of their potential for biomedical applications and micromanipulation on a small scale.
Due to the fact that magnetic fields are harmless to biological cells and tissues, magnetic fields are widely used to actuate microrobots for biomedical applications.
Tiantian Xu, Study Author and Professor, Shenzhen Institute of Advanced Technology, Chinese Academy of Sciences
Researchers created an untethered quadruped soft thin-film microrobot with four magnetic soft legs with unique magnetized profiles and a non-magnetic film body, drawing inspiration from intelligent creatures found in nature.
Demolding technology was used to create the simple robot, and high-precision 3D printing was used to create the molds.
The researchers claim that the microrobot was capable of multimodal locomotion, including straight movement and scrolling, by applying various actuating magnetic fields. The microrobot can walk on a level surface with the stride of a quadruped by alternately moving its legs in a conical magnetic field.
The quadruped microrobot can navigate in a range of difficult obstacle settings and has variable steering control in addition to stable multiple movement modes. The microrobot can traverse three tiers of stairs, each measuring 1mm in height.
The robot can traverse certain modest obstructions that are 2.2 mm high. The benefit of the microrobot’s multimodal locomotion will become apparent as the height of the barrier increases. In these cases, the microrobot can change to a rolling mode and navigate the obstruction.
In addition to being adept at navigating obstacles, the quadruped microrobot is also excellent at picking up cargo. The microrobot’s rear legs can be adjusted for distance, allowing it to grasp and release cargo depending on the strength of the magnetic field component acting in the body’s lateral direction.
Researchers have successfully guided a microrobot to move two target beads from various places to the designated target area, demonstrating the machine’s prowess in gripping and moving objects. According to trial findings, the microrobot can transfer and grab things that are up to three times its own weight.
Due to the benefit of multimodal locomotion, the quadruped soft microrobot developed by the Shenzhen Institute of Advanced Technology differs from the wired soft robots now in use in the medical area in that it has better moving, obstacle-crossing, and target-transporting capabilities.
The quadruped soft microrobot is expected to be used for stomach examination and treatment, according to Prof. Xu. Also, they will keep working to improve the gripping and motion efficiency of the microrobot design.
The study was supported in part by National Key Research and Development Project (Grant SQ2020YFB130100), in part by the National Natural Science Foundation of China (Grants 62022087 and U22A2064), in part by the Shenzhen Science and Technology Innovation Commission under Shenzhen Fundamental Research Program (Grant JCYJ20220818101611025), in part by the Youth Innovation Promotion Association of CAS, in part by the Special Support Project for Outstanding Young Scholars of Guangdong Province (Grant 2019TQ05X933), in part by the CAS-Croucher Funding Scheme for Joint Laboratories (Grant 172644KYSB20200044) and the Croucher Foundation Grant with reference no. CAS20403, in part by the Shenzhen Institute of Artificial Intelligence and Robotics for Society, in part by DMETKF2022008, and in part by SIAT-CUHK Joint Laboratory of Robotics and Intelligent Systems.
Journal Reference
Huang, C., et al. (2023) Multimodal Locomotion and Cargo Transportation of Magnetically Actuated Quadruped Soft Microrobots. Cyborg and Bionic System. doi:10.34133/cbsystems.0004