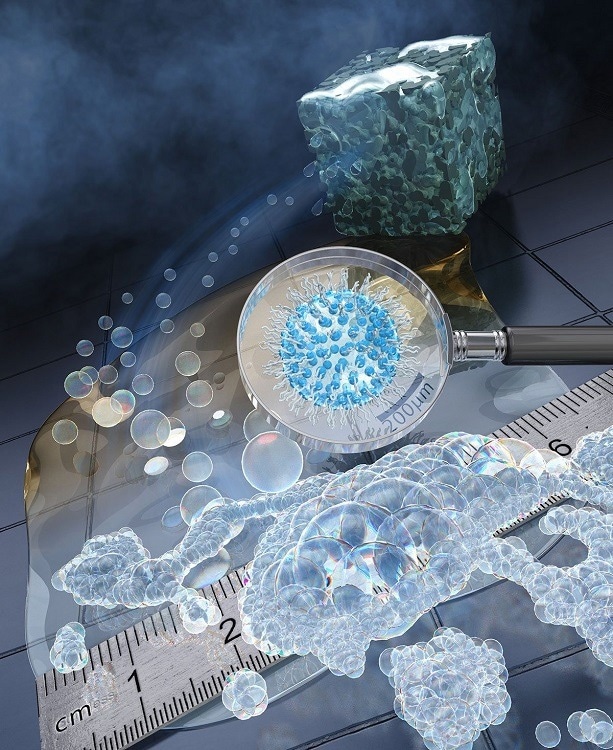
A schematic diagram of how droplets extracted from a sponge self-assemble into a multicellular body structure. Image Credit: Richard Archer / Shin-Ichiro Nomura
As far as a molecular robot is concerned, the first challenge is building the same as the majority basic requirement of any organism: the body, which holds everything together. However, manufacturing complicated structures, particularly at the microscopic level, has proven to be an engineering nightmare, and several restrictions on what is possible at present exist.
A simple method for creating molecular robots has been developed by a research group at Tohoku University for this issue to be addressed. This can be done for artificial and multicellular-like bodies by making use of molecules which have the potential to organize themselves into the preferred shape.
The team, inclusive of Associate Professor Shin-ichiro Nomura and postdoctoral researcher Richard Archer from the Department of Robotics at the Graduate School of Engineering, has recently reported their discovery in the American Chemical Society’s publication, Langmuir.
Our work demonstrated a simple, self-assembly technique which utilizes phospholipids and synthetic surfactants coated onto a hydrophobic silicone sponge.
Richard Archer, Postdoctoral Researcher, Department of Robotics, Graduate School of Engineering, Tohoku University
When Nomura and his collaborators introduced water into the lipid-coated sponge, the hydrophobic and hydrophilic forces allowed the surfactants and lipids to assemble themselves, thereby enabling water to soak in.
Further, the sponge was placed into oil, instantly developing micron-sized and stabilized aqueous droplets as the water was ejected from the solid support. While being pipetted on the surface of the water, such droplets rapidly assembled into bigger planar macroscopic structures, like bricks coming collectively to develop a wall.
Our developed technique can easily build centimeter size structures from the assembly of micron-sized compartments and is capable of being done with more than one droplet type. By using different sponges with water containing different solutes, and forming different droplet types, the droplets can combine to form heterogeneous structures. This modular approach to assembly unleashes near endless possibilities.
Richard Archer, Postdoctoral Researcher, Department of Robotics, Graduate School of Engineering, Tohoku University
Also, the team can turn such bodies into controllable devices with induced motion. To perform so, they initiated magnetic nanoparticles into the hydrophobic walls of the multi-compartment structure.
Archer states this multi-compartment method of robot design will enable adaptable modular designs with several functionalities and could rethink what one could imagine robots to be.
Future work here will move us closer to a new generation of robots which are assembled by molecules rather than forged in steel and use functional chemicals rather than silicon chips and motors.
Richard Archer, Postdoctoral Researcher, Department of Robotics, Graduate School of Engineering, Tohoku University
Journal Reference
Archer, R. J., et al. (2023) Scalable Synthesis of Planar Macroscopic Lipid-Based Multi-Compartment Structures. Langmuir. doi.org/10.1021/acs.langmuir.2c02859.