Jul 24 2017
The autonomous agent that is capable of basic sensing, data processing, communication and actuation is referred to as an unmanned system. In the past decade, the formation control of unmanned systems became one of the most active topics.
The aim is to drive multiple agents to obtain specific tasks cooperatively. Generally, suitable reference positions or distances should be maintained in order to allow the agents to prevent collisions. Based on the cooperative scheme, it is possible to accomplish more complex tasks by a collection of agents unlike a single agent that fails to do this. To date, an increasing number of applications of formation control for unmanned systems are observed in the areas of military systems, agriculture, logistics, etc., including 3D sensing, aerial photography, rescuing, exploration and surveillance.
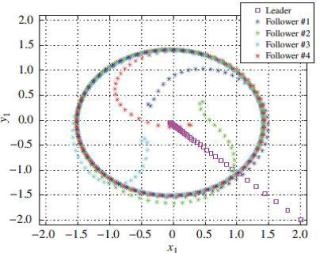 This shows trajectories of the leader and followers. (CREDIT ©Science China Press)
This shows trajectories of the leader and followers. (CREDIT ©Science China Press)
A special issue focus on formation control of unmanned Systems was published by 2017 No.7 issue of SCIENCE CHINA Information Sciences. This special focus is likely to present readers with a few latest major achievements on formation control of unmanned systems. Seven exceptional papers have been accepted in this special focus in order to cover latest improvements in applications and theoretical design of this research topic
The survey paper titled "A survey on recent progress in control of swarm systems" by Bing Zhu et al. presents some latest progress in the areas of optimal coverage/mission planning, containment, flocking, formation control, consensus, and sensor networks for unmanned systems. Some new research topics have also been suggested based on the current progress in this area.
The research paper "Formation control with disturbance rejection for a class of Lipschitz nonlinear systems" by Chunyan Wang et al. recommends a leader-follower formation control for common multi-agent systems with Lipschitz nonlinearity and unknown disturbances. The time-varying formation control is suggested with the disturbance observer for every single follower to address disturbances. The recommended strategy ensures that all signals in the closed-loop dynamics are finally bounded in a consistent manner and that the formation errors converge to a randomly small residual set.
In the research paper titled "Saturated coordinated control of multiple underactuated unmanned surface vehicles over a closed curve" by Lu Liu et al., the suggested formation control is composed by a kinematic control that has been designed based on a reduced-order extended state observer in order to compensate for the effort of the sideslip, and a kinetic control that is produced with the saturated function, the dynamic surface control and the projection operator. The parameter cyclic pursuit approach has been recommended in order to ensure that the vehicles are evenly spaced over the closed curve. Analysis of the input-to-state stability of the closed-loop system is performed through cascade theory.
The research paper "Fault-tolerant cooperative control for multiple UAVs based on sliding mode techniques" suggests a fault-tolerant cooperative control for multiple unmanned aerial vehicles, where the inner-loop fault accommodation and the outer-loop control are clearly taken into account. The reference signals for the inner-loop of the follower UAV is directly generated by resorting to a proportional control in this paper. Within finite time and in the presence of actuator faults, the estimation of the fault information is completed. The inner-loop control reconfigures the sliding mode and fault information adaptation techniques in order to compensate the deleterious effects due to failed actuators within finite time.
A consensus-based approach is proposed in the research paper "Simultaneous attack of a stationary target using multiple missiles: a consensus-based approach" by Jialing Zhou et al. This approach has been recommended in order to design the cooperative guidance law for attacking the stationary target at the same time. Time-varying navigation ratios are available for the missiles to exchange the time-to-go estimates in the midst of neighboring missiles through a communication network. It is demonstrated that the cooperative guidance law is capable of solving the simultaneous attack problem where the navigation ratio cannot be tuned in the leader-follower structure or the communication topology is undirected.
The research paper "Leader-follower formation of vehicles with velocity constraints and local coordinate frames" by Xiao Yu and Lu Liu considers the formation control of networked nonholonomic vehicles. Two dynamic control laws fulfilling the velocity constraints are correspondingly developed in order achieve the leader-follower formation defined in local coordinate frames in two cases. The proposed control laws only need each vehicle to use the information of its neighbors in the network through local measurements and communication.
In the highlight "Tight formation control of multiple unmanned aerial vehicles through an adaptive control method" by Yin Wang and Daobo Wang, a hybrid particle swarm optimization with genetic algorithm has been proposed in order to solve the multi-UAV formation reconfiguration problem, which is shown as a parameter optimization problem. This new approach incorporates the benefits of genetic algorithm and particle swarm optimization in order to simultaneously determine time-optimal solutions.