Feb 9 2018
For over ten years, biomimetic robots have been deployed along with live animals to gain a better insight into the drivers of animal behavior, such as leadership, fear, social cues, and even courtship. So far, there have always been unidirectional encounters, i.e., the animals observe and react to the robots.
However, in the laboratory of Maurizio Porfiri, a professor of mechanical and aerospace engineering at the NYU Tandon School of Engineering, the biomimetic robots can now watch back.
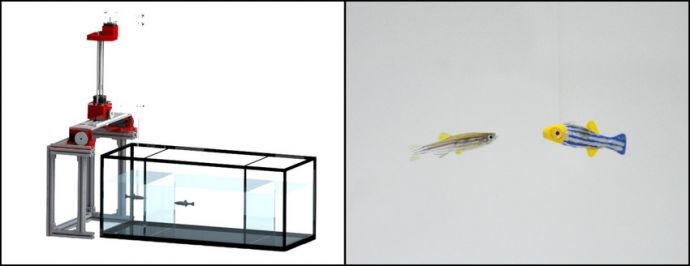 Researchers at NYU Tandon, using advances in real-time tracking software and robotics, have designed the first closed-loop control system featuring a robot interacting in three dimensions with live zebrafish. The system allows the robotic replica to both "see" and mimic the behavior of live zebrafish in real time. (Image credit: NYU)
Researchers at NYU Tandon, using advances in real-time tracking software and robotics, have designed the first closed-loop control system featuring a robot interacting in three dimensions with live zebrafish. The system allows the robotic replica to both "see" and mimic the behavior of live zebrafish in real time. (Image credit: NYU)
Leveraging the advances in robotics and real-time tracking software, Porfiri and a team of collaborators designed and tested the first closed-loop control system that features a bioinspired robotic replica which interacts in three dimensions with live zebrafish. The closed-loop control system enables the robotic model to “see” as well as imitate the behavior of live zebrafish in real time. These experiments represent the first of their kind with zebrafish. The study has been reported in Scientific Reports.
The interaction of live zebrafish and the robotic replica was tested under different experimental conditions, but in all the cases, a transparent panel was used to separate the live fish from the robotic replica. In preference tests, live zebrafish displayed greater affinity — and most importantly, no signs of fear or anxiety — toward a robotic reproduction that mimicked their behavior instead of a robot that followed a pre-set pattern of swimming.
Porfiri observed that although mirroring is a primary, restricted form of social interaction, these experiments represent the first significant step toward improving the cooperation between live animals and robots.
This form of mirroring is a very simple social behavior, in which the replica seeks only to stay as close as possible to the live animal. But this is the baseline for the types of interactions we’re hoping to build between animals and robots. We now have the ability to measure the response of zebrafish to the robot in real time, and to allow the robot to watch and maneuver in real time, which is significant.
Maurizio Porfiri
The team is now looking at social interactions among live zebrafish to get a better understanding of the natural cues and responses of animals.
We are learning what really matters in zebrafish social interactions, and we can use this information to help the robot interpret and respond appropriately, rather than just copying what it sees.
Maurizio Porfiri
The National Science Foundation supported the study.