Hybrid unmanned aerial vehicles (UAVs) are drones possessing the advantages of both multi-copters and fixed-wing planes. These drones are designed to vertically take off and land in the same manner as multi-copters, yet also have the powerful aerodynamic performance and energy-saving competencies of traditional planes. As hybrid UAVs continue to advance, however, regulating them remotely is still a challenge.
 Hybrid unmanned aerial vehicles, or UAVs, are drones that combine the advantages of multi-copters and fixed-wing planes. These drones are equipped to vertically take off and land like multi-copters, yet also have the strong aerodynamic performance and energy-saving capabilities of traditional planes. As hybrid UAVs continue to evolve, however, controlling them remotely still remains a challenge. (Image credit: Jie Xu)
Hybrid unmanned aerial vehicles, or UAVs, are drones that combine the advantages of multi-copters and fixed-wing planes. These drones are equipped to vertically take off and land like multi-copters, yet also have the strong aerodynamic performance and energy-saving capabilities of traditional planes. As hybrid UAVs continue to evolve, however, controlling them remotely still remains a challenge. (Image credit: Jie Xu)
Researchers from the MIT's Computer Science and Artificial Intelligence Lab (CSAIL) have come up with a new method to automatically design a mode-free, model-agnostic, AI-powered controller for any hybrid UAV.
The team will showcase their novel computational controller design at SIGGRAPH 2019, conducted between July 28th and August 1st in Los Angeles. This yearly conference highlights the world's leading creative minds, experts, and academics at the forefront of computer graphics and interactive methods.
To regulate hybrid UAVs, one system controls the vehicle's copter-model rotors for hovering and a different one controls the plane-model rotors for distance and speed. Undeniably, handling hybrid UAVs is tough because of the complexity of the flight dynamics of the vehicle. Usually, controllers have been developed manually and are a laborious process.
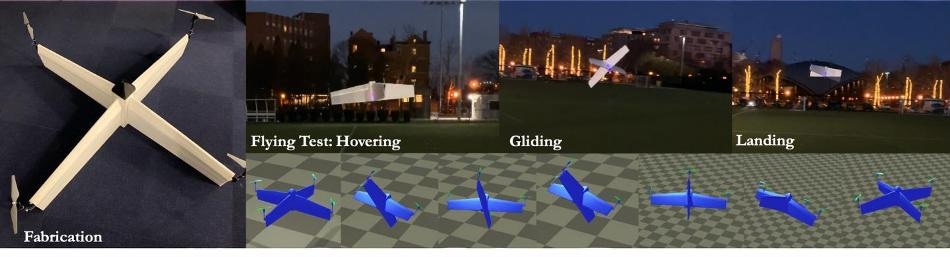
In this work, the researchers looked at how to automatically build one single controller for the various flight modes (gliding mode, copter mode, transition, etc.) and how to simplify the controller design technique for any UAV model, structure, or shape.
Designing a controller for such a hybrid design requires a high level of expertise and is labor intensive. With our automatic controller design method, any non-expert could input their new UAV model to the system, wait a few hours to compute the controller, and then have their own customized UAVs fly in the air. This platform can make hybrid UAVs far more accessible to everyone.
Jie Xu, Researcher and Study Co-Author, CSAIL, MIT
The scientists’ technique contains a neural network-based controller design trained by reinforcement learning methods. In their new system, users primarily design the hybrid UAV’s geometry by choosing and matching parts from a provided data set. The design is then applied in a realistic simulator to mechanically measure and test the UAV's flight performance. Reinforcement learning algorithm is then applied to automatically learn a controller for the UAV to accomplish top performance in the high-fidelity simulation. The team positively validated their technique in simulation as well as in real flight tests.
With the continued popularity of hybrid UAVs—in the flight industry and military divisions, for example—there is a growing demand to streamline and automate controller design. In this project, the scientists intended to deliver a novel model-agnostic technique to automate the design of controllers for vehicles with very different configurations.
Going forward, the team plans to explore how to boost the maneuverability through enhanced geometry design (shape, positions of wings/rotors) so that it can help improve the flight performance of the UAV.