The bearer cables and tethers of bridges, elevators, and cable cars are exposed to high levels of stress. For this reason, their functional reliability must be monitored on a regular basis. A new robot recognizes fissures before they pose a danger.
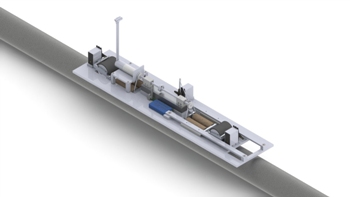 CAD model of the robot inspecting a wire cable. © Fraunhofer IZFP
CAD model of the robot inspecting a wire cable. © Fraunhofer IZFP
Slowly, very slowly, the robot climbs up the wire cable. As it crawls upward with caterpillar-like movements, it scans the steel surface and detects whether it has any defects. Researchers at the Fraunhofer Institute for Nondestructive Testing IZFP have named the system FluxCrawler. It is designed to monitor the quality of stay cables and wire ropes on a regular basis. Such cables are common features of bridges, elevators, cranes, cable cars, and ski lifts. And these checks are vital, as the tension-induced strain, wear, and corrosion that affect these steel cables mean that they are under enormous stress.
By conducting a magnetic flux leakage test, the robot not only identifies tiny fissures in the cable surface, it also recognizes deeper cracks. This process exposes the cable to a magnetic field that is “disrupted” in the event of a defect. A measurable leakage field is created wherever defects are located. “If such micro-fissures are not discovered in time, the steel can break. This is why material checks are absolutely vital to avoid deadly consequen- ces or even catastrophes”, says Dr. Jochen Kurz, an engineer and department head at IZFP in Saarbrücken.
Test system is suitable for many cable sizes
While the testing of steel cables using magnetic flux leakage is already a common approach, until now coils were used that had to clasp the cable. But this posed a problem: since the diameter of steel cables and their jackets vary considerably, the coils’ limited diameter range meant that they could only be used in a limited number of instances. Moreover, they were unable to locate the exact angle of a defect. In contrast, FluxCrawler can be applied regardless of a cable’s diameter. The robot, which is about seventy centimeters long, scans cylinder-shaped surfaces by revolving around the cable. As a result, there is no need to clasp the cable. A permanent magnet prevents slipping and holds FluxCrawler to the cable. At the same time, it generates the magnetization required to make measure- ments. Between the two ends of the u-shaped magnet, a line of sensors equipped with several probes is able to rapidly scan the surface. While FluxCrawler moves around the cable, these sensors can identify the exact angle of the defect: they recognize whether defects are on the left, on the right, on the bottom or on top of the cable. The robot can carry out checks on cables with diameters ranging from four to 20 centimeters. The battery-operated platform is controlled with a computer via Bluetooth. An image of the magnetic field on the cable’s entire surface appears on the computer, and each conspicuous spot is illustrated in high resolution on the computer screen.
Cooperation with the French Carnot Institute
FluxCrawler is the result of “FilameNDT” project (NDT is short for nondestructive testing). Jochen Kurz and his team from IZFP are cooperating with the French Carnot Institute VITRES-IFFSTAR to further develop magnetic leakage testing as well as other non- destructive testing methods. These include using Electromagnetic Acoustic Transducers (EMAT) and micromagnetic testing methods, the latter being used for monitoring purposes. “It should be noted that FluxCrawler cannot be used in all situations. For instance, the robot cannot recognize defects in covered areas, for instance in the area where the cable is anchored. To detect defects in such cases, we apply another non-destructive testing method, namely, EMAT,” says Kurz. To do this, the researchers create a guided ultrasound wave with a transducer that is placed directly on the cable. The wave penetrates the material and is reflected when it hits a flaw. The signals that are sent back to the computer are used to reconstruct an image. The computer uses this image to analyze the physical changes that the wave perceives in the material, and can thus determine the situation in the material’s interior. As a result, the seriousness of even the smallest of flaws can be determined.
A monitoring system is already being tested at a bridge in Mettlach, Germany that is currently undergoing renovation. Kurz and his team are confident that FluxCrawler will soon be used in everyday practice to diagnose defects: the team has already received enquiries from industry. The robot is now patented, and the researchers have already successfully tested cables in the laboratory. In the next step, tests will be conducted at DMT GmbH, a cable testing facility in Bochum that comprises a testing laboratory for non-destructive and destructive testing.