The pursuit of space travel has long been one of humanity’s most ambitious endeavors, driven by the desire to explore beyond Earth’s boundaries and extend our presence into the solar system. Robots have played a central role in this quest, acting as our pioneers where humans could not yet venture.
Since the launch of Sputnik 1 in 1957, robotic spacecraft, rovers, and landers have journeyed far and wide, even into interstellar space, collecting invaluable data and expanding our understanding of the cosmos.
Recent advancements in robotics have made space exploration safer, more efficient, and increasingly autonomous, enabling robotic systems to perform complex tasks such as navigating challenging terrains, conducting scientific experiments, and maintaining orbital infrastructure without direct human intervention.
Want all the details? Grab your free PDF here!
The US’ First Private Robotic Lunar Rover
The Mobile Autonomous Prospecting Platform (MAPP), developed by Colorado-based Lunar Outpost, has become the first commercial exploration vehicle to land on the lunar surface. The rover launched aboard Intuitive Machines' Athena lander on February 26th, 2025, from Cape Canaveral, Florida, on a SpaceX Falcon 9 rocket. After an eight-day journey, the Athena lander attempted to land near the Moon’s south pole on March 6th, 2025, targeting the Mons Mouton region.
Unfortunately, during landing, Athena tipped onto its side, preventing MAPP from deploying onto the lunar surface, but the rover still managed to operate successfully in cislunar space and continued transmitting data for about 2.7 hours from its position inside the lander. Despite the off-nominal landing, MAPP collected valuable sensor data, including real-time environmental measurements and payload operations such as deploying MIT's micro-rover AstroAnt and testing Nokia's LTE/4G communications system for lunar surface networking.
This mission marked the first commercial American rover sent to the Moon and the first attempt to operate near the lunar south pole, laying the groundwork for future private lunar exploration missions. Lunar Outpost plans a follow-up lunar rover mission, Lunar Voyage 2, set for 2026 to explore the Reiner Gamma region.
All in all, MAPP serves as a versatile solar-powered platform designed to support high payload capacity while providing critical data to enhance future crewed and robotic lunar missions like NASA’s Artemis 3 planned for 2027.
However, future iterations will need to address challenges such as regolith abrasion, thermal extremes, and limited energy availability during prolonged lunar nights.
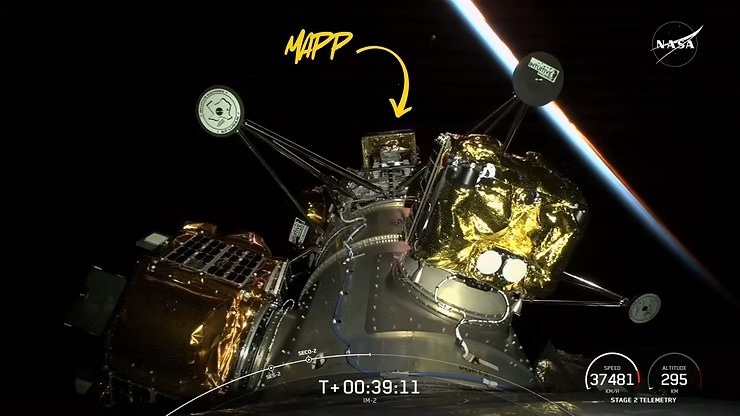
Image Credit: Lunar Outpost
Next-Generation Space Robotic Servicing System: Northrop Grumman’s MRV
Northrop Grumman's Mission Robotic Vehicle (MRV), integrated with a robotics payload from the US Naval Research Laboratory, marked a significant advancement in June 2025 when the payload was fully integrated onto the MRV spacecraft bus at the company's Dulles, Virginia, facility. This integration is part of DARPA’s Robotic Servicing of Geosynchronous Satellites program, aimed at enabling robotic servicing, repair, inspection, relocation, and life extension of satellites in geosynchronous Earth orbit (GEO).
The MRV builds upon Northrop Grumman's prior successful satellite servicing missions using the Mission Extension Vehicle (MEV) series, which extended the lives of commercial satellites such as Intelsat 901 and 1002. The MRV will carry multiple Mission Extension Pods (MEPs) that it can attach to client satellites, effectively serving as propulsion "jetpacks" to extend satellite operational life by five or more years.
Northrop Grumman planned to subject the MRV with its integrated robotics payload to environmental testing to ensure it is space-ready, with an expected launch in 2026. Once operational, the MRV will perform complex tasks, including satellite inspection with over 20 onboard cameras, installing life-extending pods, performing repairs, relocating satellites to different orbits, and potentially upgrading satellite payloads. The system is designed to address critical satellite fleet management challenges, reduce orbital debris, and optimize satellite lifecycle, supporting both commercial and national security missions.1
Still, regulatory frameworks, secure communications protocols, and collision-avoidance systems will need to evolve to manage the increasing complexity of servicing operations in densely populated orbits.
China’s Space Mining Robot Prototype
Looking beyond Earth orbit, China is investing in robotic mining for deep-space resource extraction. The China University of Mining and Technology (CUMT) has recently developed China’s first multifunctional space mining robot, engineered for operation in microgravity environments on asteroids and lunar surfaces.
The prototype features a six-legged configuration with wheeled and clawed limbs, ensuring stable mobility under low-gravity conditions. It utilizes an insect-inspired claw mechanism that enhances adhesion and anchorage, overcoming the limitations of gravity-dependent drilling. This design allows for stable operation across irregular terrain while conducting sampling tasks.
Over the next decade, such robotic systems are expected to enable safe and efficient mining on extraterrestrial bodies, allowing continuous resource recovery while minimizing risks to human crews and supporting the establishment of sustainable lunar bases and deep-space missions.2,3
Still, significant technical challenges remain - ranging from long-distance communication delays and radiation tolerance to dust mitigation and energy storage in extreme environments.
Vyommitra: India’s Humanoid Space Assistant
The Indian Space Research Organization (ISRO) is also making huge progress, with plans to launch Vyommitra, the nation’s first humanoid robot, into space in December 2025, marking a milestone in India’s human spaceflight program.
Vyommitra is a semi-humanoid robot designed to function as an intelligent companion for astronauts under the Gaganyaan mission. It will evaluate spacecraft systems, control modules, and environmental parameters before crewed missions commence. The robot integrates voice recognition, advanced sensors, and limited artificial intelligence to simulate human physiological responses and autonomously manage basic operational tasks.
While Vyommitra does not replicate full physiological responses, it will simulate critical human functions such as thermal regulation and environmental monitoring to help validate life-support systems. Its deployment will validate the safety and reliability of the Gaganyaan crew module, paving the way for India’s first human spaceflight in 2027.4
If successful, Vyommitra may influence the broader adoption of robotic assistants in long-duration missions, especially those requiring reduced crew workload or enhanced system autonomy.
NASA’s CADRE: Collaborative Multi-Robot Exploration
NASA’s Cooperative Autonomous Distributed Robotic Exploration (CADRE) mission also marks a major advancement in autonomous multi-robot exploration. Scheduled for launch to the Moon’s Reiner Gamma region in 2025-2026 aboard Intuitive Machines’ IM-3 lander, it will deploy three solar-powered, suitcase-sized rovers and a base station capable of coordinated, self-directed operations without human control.
Each rover integrates cameras and multi-static ground-penetrating radar to conduct synchronized surface imaging, subsurface mapping, and three-dimensional terrain reconstruction while maintaining precise formation. The mission’s software framework integrates centralized planning with distributed execution, enabling collaborative task allocation, real-time coordination, and resource management under lunar environmental constraints.
CADRE could set a precedent for future planetary exploration missions, where robotic fleets work together to conduct large-scale scientific operations, prepare terrain for human arrival, and reduce mission risk and cost.5
Nevertheless, CADRE’s performance will be closely watched, with an eye on issues related to its resilience against lunar dust accumulation, fluctuating surface temperatures, and potential communication blackouts between units.
NASA’s CADRE: Mini Rovers to Explore the Moon as a Team
JAXA’s MMX: Sample Return from Mars’ Moon
The Japan Aerospace Exploration Agency's (JAXA) Martian Moons eXploration (MMX) mission, scheduled for launch in 2026, will attempt the first-ever sample return from Phobos, Mars’ largest moon.
The spacecraft will use two sampling systems: a coring sampler (C-SMP) for subsurface material beyond 2 cm and a pneumatic sampler (P-SMP) for surface collection. Together, these tools aim to retrieve over 10 grams of material within a 2.5-hour window. Samples will then be transferred by a robotic arm to a return capsule, with delivery to Earth expected in 2031.
This mission is hoped to provide Earth with access to rare or critical extraterrestrial materials while informing the selection of minerals and resources necessary for future Mars infrastructure and sustained off-world operations.6
However, the extended return timeline and unknown mechanical stresses over multiple years of travel make MMX a particularly ambitious test of robotic durability and interplanetary navigation.
Implications for Future Space Operations
As 2025 draws to a close, it's clear that space robotics has significantly influenced the landscape of space exploration, infrastructure development, and extraterrestrial resource utilization. Whether it’s mining asteroids, servicing satellites, or exploring with intelligent rover teams, robotic systems are becoming integral to every stage of space operations.
While optimism surrounds these innovations, future missions must contend with technical fragility, uncertain funding, and the evolving legal frameworks surrounding resource rights and robotic autonomy in space.
Nonetheless, one thing is clear: these developments are creating the framework for a sustainable and interconnected extraterrestrial infrastructure, positioning human-robot collaboration as a central element of future space missions.
Want to Learn More About Robotics in Space? You Might Find These Topics Interesting:
References and Further Reading
- Klicka, E. (2025). Northrop Grumman Successfully Integrates Spacecraft for Next-Generation Space Robotic Servicing System. https://news.northropgrumman.com/spacecraft/Northrop-Grumman-Successfully-Integrates-Spacecraft-for-Next-Generation-Space-Robotic-Servicing-System
- CGTN. (2025). China unveils space mining robot for asteroids and the Moon. https://news.cgtn.com/news/2025-03-17/China-unveils-space-mining-robot-for-asteroids-and-the-moon-1BOmXpLvYis/p.html
- Indian Express. (2025). ISRO’s Vyommitra - A robot friend on Gaganyaan that can talk, think, and work in space. https://indianexpress.com/article/technology/science/isro-vyommitra-humanoid-robot-gaganyaan-mission-10286775/
- CUMT. (2025). China unveils its first space mining robot inspired by insect movement. https://news.cumt.edu.cn/info/1007/71932.htm
- Rabideau, G., Russino, J., Branch, A., Dhamani, N., Vaquero, T. S., Chien, S., & Rossi, F. (2025). Planning, scheduling, and execution on the Moon: The CADRE technology demonstration mission. ArXiv. https://doi.org/10.48550/arXiv.2502.14803
- JAXA. (2025). Science behind MMX rover. https://www.mmx.jaxa.jp/en/science/
Disclaimer: The views expressed here are those of the author expressed in their private capacity and do not necessarily represent the views of AZoM.com Limited T/A AZoNetwork the owner and operator of this website. This disclaimer forms part of the Terms and conditions of use of this website.