Scientists have often looked to nature for inspiration in the design of new technologies, including robots. If the characteristics of living organisms like insects are replicated in mobile robots, they could offer a new way to explore dangerous environments, assist with infrastructure monitoring, and even be used in healthcare.
Despite this potential, robotics has historically struggled to successfully mimic the dexterity and efficiency of such creatures. Balancing perception, motion control and actuation with an efficient, low-cost energy system within a miniature structure has hindered microrobot innovation.
However, new research from Cornell University reports the production of a soft microactuator powered by the combustion of a chemical fuel, methane. The study was recently published in Science and presents a huge leap for constructing impactful, insect-scale robots.
Microactuator Innovation
Actuators are a critical component of any mobile robot, controlling much of its movement abilities. Due to their small size and low-energy density power sources, the actuators, or microactuators, used in small robot systems tend only to produce small forces, significantly limiting the robot’s range of motion.
Hoping to address this, Aubin and colleagues wanted to see if alternative power sources like chemical fuels could offer a better solution. After all, the energy density of combustibles like hydrocarbons surpasses that of common energy sources like lithium-ion batteries.
Chemicals fuels have much higher energy densities than most other energy sources; so, if harnessed appropriately, robots can have longer operations lifetimes. Further, the energy has the potential to be released very fast, which is one of the most important features of this paper; high power output in soft, small actuators.
Robert F. Shepherd, Ph.D., Author, Associate Professor, Cornell University
Weighing just 325 milligrams, the microactuator constructed by the team features a 3D printed combustion chamber, inflatable elastomeric membrane, electrodes and fuel injection tubing. Notably, its design was cost-effective and quick to manufacture, using a CLIP (continuous liquid interface production), 3D printer and resin to construct.
To function, the electrodes ignite the methane present in the combustion chamber with a spark, triggering the microactuator’s elastomeric membrane to expand within an average of 0.55 milliseconds.
The team explains that such a rapid expansion, described as ‘piston-like actuation’ could be used to drive movements or launch objects. Once the combustion gases vent from the chamber, the cycle is repeated.
The soft combustion-powered microactuator reportedly achieved a displacement of 140%, could operate at frequencies less than 100 hertz, and impressively, could generate forces exceeding 9.5 newtons.
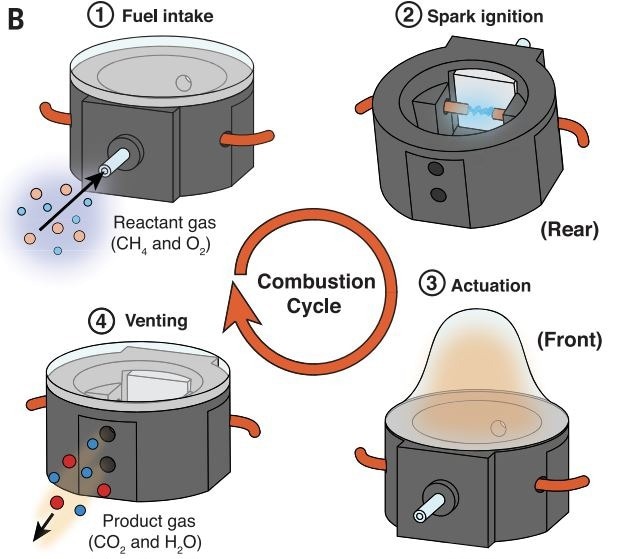
Diagram of the combustion actuation process. Image Credit: Cameron Aubin, Cornell University
Integration into Insect-Scale Robot
To further demonstrate the effectiveness of their new actuator and evidence its applications to microrobots, the researchers used it to power a quadrupedal insect-like robot just a few centimeters in size.
Speaking on his surprise at the success of the integration, one of the study authors, Associate Professor Robert F. Sheperd, commented, "Being able to steer and perform multiple gaits, jump so high, and carry so much load was well beyond our initial expectations. We thank Professor Amir Gat for modeling these processes exquisitely."
Testing its ability to complete dynamic movements, the team found that the robot could crawl at high speed and perform large vertical leaps, or ‘hops’. Not only that, but the robot was also able to carry a payload 22 times its body weight.
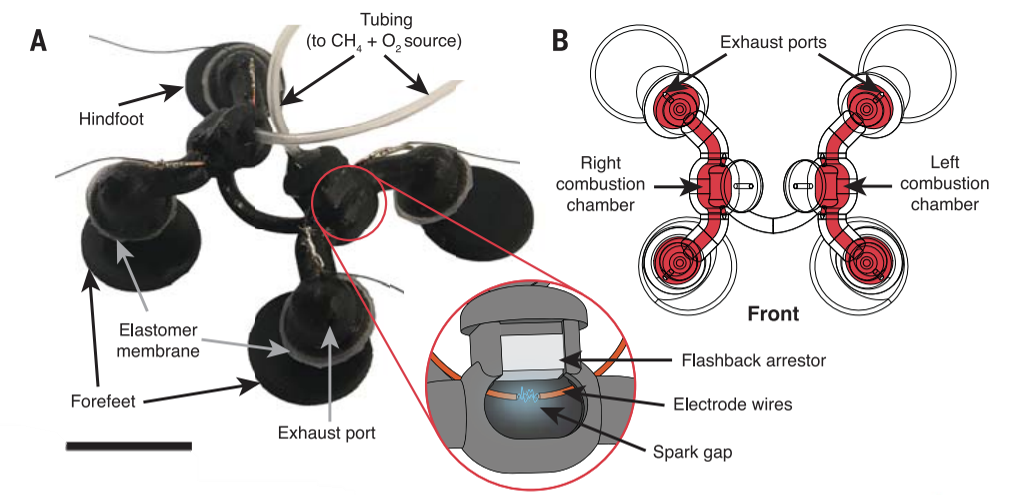
Photograph of the robot with component parts labeled. A schematic of the interior of the combustion chamber is also provided. Scale bar, 1 cm. Image Credit: Cameron Aubin, Cornell University
Such a diverse movement set, particularly its ability to leap, is a rarity for conventional crawling robots in current literature, emphasizing the potential the team’s new microactuator could have for future designs.
But it is not just the potential of its actuator's power source that makes it stand out: its 3D printed design gives it an ease of manufacture uncommon for existing systems while also offering a standard integration that could help address the bespoke route of design many have to follow.
The microactuator’s soft surface also gives it a level of durability that can withstand diverse movements without damaging the surrounding environment.
Designing an actuator with these qualities is essential if microrobots are to harness the speeds, strengths and capabilities typically only available to larger robotic systems. For this reason, Auben and colleagues’ microactuator breakthrough could transform how microrobots are not only powered, but how researchers approach their entire design too.
We want to untether it, which is possible due to the large payloads it can carry. Putting fuel and controllers onboard is well within the energy and work budget. I’m even more excited about making larger arrays of these small actuators for powering large, human scale robots. There is a great future for the use of these small engines.
Robert F. Shepherd, Ph.D., Author, Associate Professor, Cornell University
Looking to the future, it will be interesting to see how the team’s microactuator performs with alternative robot designs and prolonged movement. If its applicability can match the success of its current insect-inspired host, it could revolutionize how we use tiny robots.
The research project received funding from the U.S. Air Force, the U.S. Navy and NSF.
Reference
Aubin, C.A., et al., (2023). Powerful, soft combustion actuators for insect-scale robots, Science., 381, 6633. Available at: https://doi.org/10.1126/science.adk0522