By Kalwinder KaurJun 11 2012
Locomotor pattern generation and balance will be impacted as a result of any impairment in central nervous system (CNS).
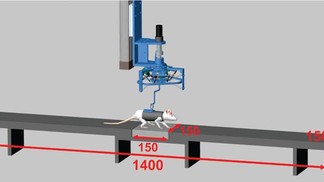 Versatile robotic interface to evaluate, enable and train locomotion and balance after neuromotor disorders
Versatile robotic interface to evaluate, enable and train locomotion and balance after neuromotor disorders
These subfunctions cannot be directly and independently assessed due to some technical limitations, which also prevent its rehabilitation.
Chair in Spinal Cord Repair, Prof. Grégoire Courtine and his team has unveiled a flexible and efficient robotic interface to assess, enable and subsequently train independent pattern generation and balance in the course of natural walking behavioral activity in rats.
- During evaluation mode, the robotic interface performs clear assessments of pattern generation and dynamic equilibrium, following stroke and spinal cord injury (SCI).
- During enabling mode, the robot behaves like a postural or propulsive neuroprosthesis that can lead to unexpected locomotor capacities at once. Some of the incredible locomotor capabilities expected in rat can be listed as stair climbing following partial SCI, accurate paw placement soon after stroke and overground walking after undergoing complete SCI.
- In training mode, weight-supported locomotion will be reinstated along with coordinated steering and balance in rats with a paralyzing SCI that results from robot-enabled rehabilitation, monoamine agonists and epidural electrical stimulation.
This new robotic technology and related concepts ensure a wide range of implications that include assessment as well as re-establishment of motor functions following CNS disorders. It is found to be effective for animals and humans as well.
Disclaimer: The views expressed here are those of the author expressed in their private capacity and do not necessarily represent the views of AZoM.com Limited T/A AZoNetwork the owner and operator of this website. This disclaimer forms part of the Terms and conditions of use of this website.