The Obourg facility of Comet Traitement in Belgium boasts Europe’s largest automobile shredder. This 7,000-HP heavy-duty metal handling machine processes 300 tons of scrap cars per hour.

The result: precious non-ferrous parts, sorted and ready for reuse. Image Credit: Stäubli Robotics
A completely different yet equally outstanding high-speed automation process takes place close by: The “Megapicker” line featuring a total of 18 Stäubli SCARA robots sorts 15,000 tons per year of precious non-ferrous metal fractions, with a cycle time of 1 second per robot.
Extracting Value from the Last Scrap
An old car is primarily made of different metals, mainly steel, which can easily be reintroduced into the recycling loop as on-site shredded scrap. This well-established process is widely employed. For example, steel mills employ this scrap as a secondary raw material.
Approximately 15 million tons of steel were reused this way in 2023 in Germany alone, through car recycling and via other sources. This approach is efficient, cost-effective, and sustainable, with each ton of steel scrap saving 1.5 tons of newly mined iron ore and 0.5 tons of fuel while considerably reducing CO2 emissions.
The recycling process is different for the non-ferrous portion of the shredder residue, which amounts to around 800,000 tons per year in Germany. This is generally exported from Europe to Asia, where it is manually sorted before being remelted.
The Megapicker robotic sorting system developed by Comet and Cilyx features fully automated sorting and no need for long-distance transportation, allowing these valuable metal components to be cleanly reintegrated into the recycling process. It is even possible to recycle precious metals from circuit boards using the Megapicker, with Stäubli robots playing a key role in this process.
Seeing the highest-level robot-based industrial automation implemented at a site where scrap cars are shredded is unexpected by many, and this situation is certainly unique.
The Comet Metalsambre site in Obourg, near Mons, Belgium, sees heavy-duty metal handling taking place, with large numbers of end-of-life vehicles being dismantled and shredded. The highest precision is requested in a new building, however, because, it is the end of the process.
Grégory Lewis, R&D Officer at Comet, explains: “Here we are sorting the shredded non-ferrous metal fractions and making them ready for re-use.”
This approach effectively closes the loop with ‘reverse metallurgy,’ representing significant progress in the metal recycling value chain. Grégory Lewis continues:

The line is able to sort 15,000 tons of scrap metal per year, with a cycle time of one second per robot. Image Credit: Stäubli Robotics
“Part of our car recycling process is the concentration of the remaining non-ferrous metals within a fraction called ZORBA, which means zinc, aluminum – this is the biggest part – copper, brass, stainless steel, and printed circuit boards. We were used to exporting this material to Asia, where it was sorted manually and fed back into smelting. From 2017 on, we started to think, ‘Could we secure this kind of material, valorize it and use it within Europe?’”
This work represented the beginning of the ‘reverse metallurgy’ project, which has now been implemented with the Megapicker. Comet approached Cilyx, a Liége-based automation expert, which had considerable experience in the design of highly automated, robot-based processes. This experience did not extend to metal recycling, however.
Grégory Reichling, CEO of Cílyx explains, “At first, we had to find a technology to characterize the single metal fractions for small parts in high quantities.”
Cilyx and Comet worked alongside the University of Liège, which had developed an intelligent high-throughput sorting system by leveraging a combination of sensor technologies, including XRT (X-ray transmission) to measure the material’s density; 3D scanning to determine the crushed objects’ shape parameters (including the center of gravity); LIBS laser systems; and hyperspectral color sensors able to measure their reflectance spectrum.
These measurements all take place within a few seconds at the line’s starting point, with each part’s sensor data combined to determine its way through the line.
Sorting 1,500 Irregularly Formed Metal Pieces Per Minute on a Single Line
The Cilyx engineer also addressed the second issue of successfully picking and sorting 1,500 metal pieces per minute (90,000 parts per hour). This task was made more challenging due to the parts being irregularly shaped and featuring weights from 20 g to 1 kg and lengths from 20 to 100 mm.
This was done using a 50 m-long conveyor belt driven at 1 m/s, with 18 four-axis Stäubli TS2-100 SCARA robots mounted above it. A control mode to ensure effective ‘division of labor’ was created, ensuring each robot is busy all the time, while also ensuring that minimal material was left unsorted and unpicked at the end of the belt.
It was also important to consider economics. Grégory Lewis, R&D Officer at Comet, elaborates, “We have to be competitive compared to the manual sorting business in Asia, which is very low-cost.”

Plant manager Olivier Loire surveys the operational status of the line. Image Credit: Stäubli Robotics

Left to right: Grégory Reichwein, Managing Director of Cilyx, Plant Manager Olivier Loire, and Grégory Lewis, R&D Officer at Comet. Image Credit: Stäubli Robotics
Challenges: Gripper Design and Control System Concept
This approach took several years to effectively put into practice. Grégory Reichling continues, “We began with a lab-sized test machine which we improved and tested in many loops before scaling the process up and designing the full-size line. We started with the gripper, which was a real challenge. Each part is different. The gripper has to grab the part at the center of gravity; it must grip the parts firmly, but without touching the belt. Otherwise, the lifetimes of the belt and the gripper would be limited.”
High Data and Information Density
The control of the line represented a further challenge. It was necessary to ensure that each part is gripped by one of the 18 robots within a cycle time of 1 second per robot. This resulted in the information rate being very high, with combined sensor data of 1,500 individual parts requiring conversion into commands for the robots.
Intense communication was required between the robots and the overarching Siemens-based control system of the Megapicker. Cilyx decided to create modules of four robots to facilitate a more streamlined installation. When one module was installed and qualified, the others could be copied.
The capacity for 18 robots to work with extreme speed, gripping scrap parts from a fast-moving belt before sorting these in one of five (soft) containers, is especially impressive because the robots themselves do not employ cameras or sensors.
Grégory Reichling explains, “The robots are directed and controlled by the central control only. We just send x/y/z and angle data for the exact position to each robot. There is only one ‘smart sensor’ at the end of the line, which tracks the shredded non-identified and non-sorted items.”
Precise and Robust SCARA Robots
Delta pickers could be an ideal first choice in an application involving the extremely fast picking of single parts from a belt. Cilyx used this approach for the lab version of the line, but instead opted to use Stäubli SCARA robots for the Megapicker.
These robots were selected for a number of reasons. For example, the gripper is relatively heavy, and the shredded parts weigh up to 1 kg, meaning that delta robots are not strong enough to accommodate this weight.
Their robust design also allows SCARA robots to work with high precision in a heavy-duty environment.
A robot’s manufacturer is also a key consideration, as Grégory Reichling explains: “We had a lot of support from Stäubli during the development. For us, this was a new application with many challenges. We solved them together, as we did in other applications. In our view, Stäubli delivers excellent development support.”
Improving Detection Rate with AI
The system includes artificial intelligence capabilities, meaning that the detection rate is continually increasing.
Grégory Lewis continues, “Undetected material is brought into re-circulation a second time and we continuously feed the control with new data. This self-learning loop gets better with time. Currently, we have arrived at a sorting rate of 96 % and there is still room for improvement.”
Other features are also being improved, as Grégory Reichwein highlights, “Since the Megapicker went into operation, we have been optimizing. We have, for instance, improved the workload of each robot to make sure they all work together perfectly.”
Integrating New Sensor Technology
Grégory Lewis outlines the groundbreaking developments currently ongoing, beyond the improvements already mentioned: “At the moment, Cilyx and Comet are investigating the addition of a new laser sensor, which will re-fine the sorting. We then would be able to separate different types of aluminum and, in consequence, deliver more added value to the customer.”
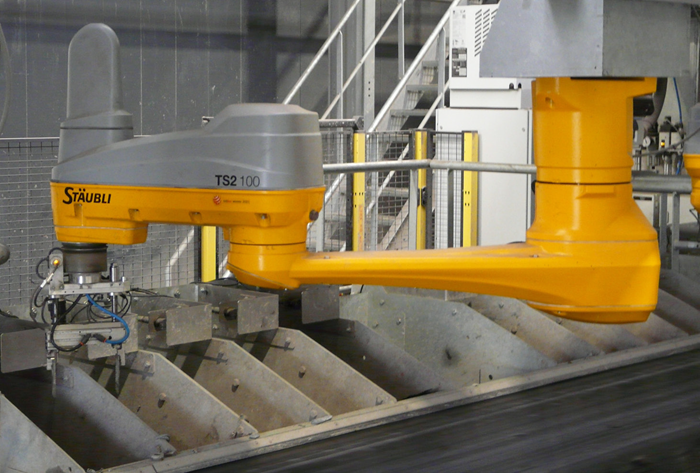
Image Credit: Stäubli Robotics

Image Credit: Stäubli Robotics
The Megapicker is subject to ongoing continuous improvement, but Comet’s experts remain highly satisfied with the existing system from both a technical and commercial perspective, with Grégory Lewis stating that “We expect an ROI within five years.”
Sustainability is also enhanced by higher recycling rates, as precious metals can be reused in Europe without ‘downcycling.’ This represents a tangible win-win situation and a strong example of the principle of ‘reverse metallurgy.’
The University of Liège has also launched a new company focused on new applications and new markets centered around the sensing and characterization system for non-ferrous metal fractions.

Image left: The single parts, with weights from 20 g up to 1 kg, are sorted into soft containers. Image right: All in a row: In the Megapicker line, 18 Stäubli robots are employed to sort precious non-ferrous shredded parts from car recycling. Image Credit: Stäubli Robotics
Acknowledgments
Produced from materials originally authored by Staubli Corporation.

This information has been sourced, reviewed and adapted from materials provided by Stäubli Robotics.
For more information on this source, please visit Stäubli Robotics.