A recent case study from Stäubli showcased how six of the company’s ceiling-mounted robots, a total of 13 image processing systems, and the system manufacturer’s specialist expertise were key to ensuring rapid, reliable, efficient assembly and inspection of 5,000,000 high-voltage connectors destined for use in electric and hybrid vehicles in Mexico.
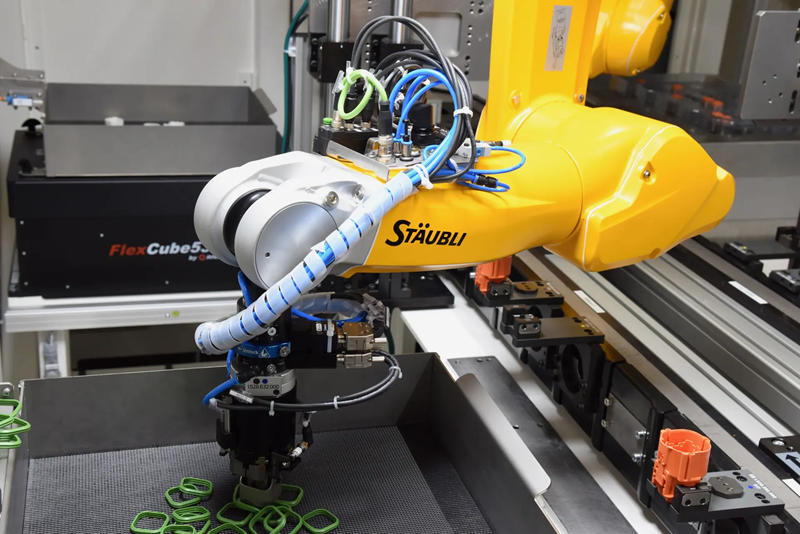
Image Credit: Stäubli Robotics
Highly automated system for the assembly of high-voltage connectors
Video Credit: Stäubli Robotics
The Task
This work focused on the robot-assisted assembly of high-voltage connectors for electric vehicles. Assembling as many as five million high-voltage connectors per year for electric and hybrid vehicles places significant demands on automated systems.
This is particularly important when retooling is required on a daily basis, based on the product variants being manufactured. A trend-setting system is key to ensuring highly flexible production in this instance.
Electromobility is a common topic of discussion across the industry, prompting increased demand for assembly solutions for electric components from specialist machine producers like Eberhard AG, headquartered in Schlierbach.
This international automotive supplier commissioned Stäubli to undertake a challenging project to plan and implement an assembly system capable of accommodating 5,000,000 high-voltage connectors per year.
The system was required to manage the actual assembly, as well as the optical inspection of all assembly steps, connector leakage tests, and their packaging in trays.
The Solution
The initial question posed by this project was around how an assembly system that comprised of six robots, 13 stations, and 13 vision systems can be implemented in an extremely compact space. The solution involved suspending the robots above the stations to significantly improve space efficiency.
All six robots employed are highly precise Stäubli six-axis TX2-60L models. This version offers extended reach, compact design, excellent dynamics, interface between feeders and cameras, and unparalleled reliability. Four of these six robots were fitted with cameras to capture parts of the feeder system.
The connector assembly follows a clear concept, with a quality test taking place following each step.
For instance, at Station 1, the first TX2-60L takes a connector housing from a feed conveyor and places it into a workpiece carrier, which will carry the component through every station within the system. Station 2 features an immediate optical quality control, which checks encoding and color.
The system operates on the principle of assembly followed immediately by inspection, with the connector housing moving through all subsequent stations until completion.
A further leakage test is performed before the final Stäubli robot transfers the completed high-voltage connector to the palletizing system. Eberhard employs a rotary table with four stations and a quadruple test fixture to maintain cycle time and avoid any bottlenecks.

Five million high-voltage connectors will be assembled annually on the highly structured assembly system. Image Credit: Ralf Högel
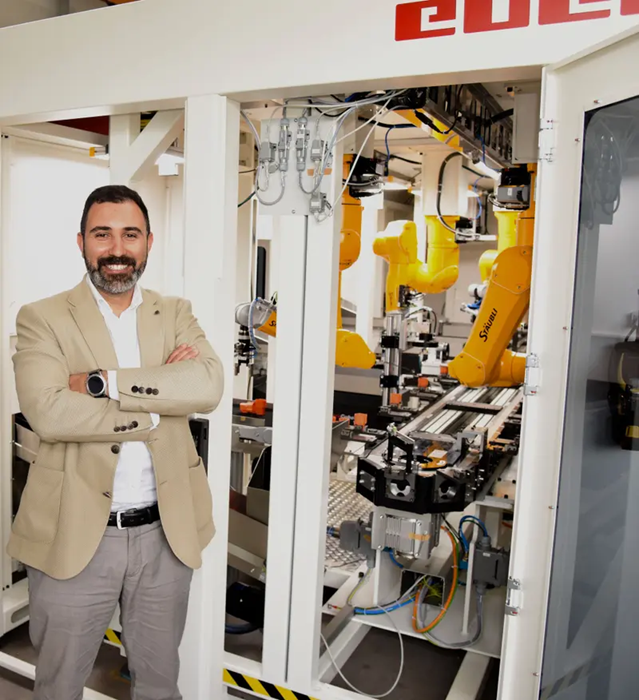
Abdullah Kotan, Team Leader for Project Planning and Application at Eberhard, is pleased with the project's successful completion. Image Credit: Ralf Högel
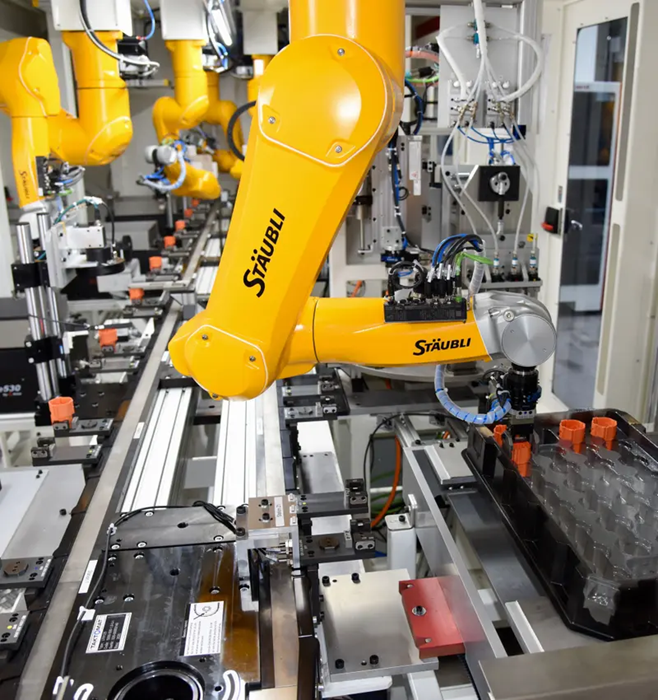
A total of six ceiling-mounted Stäubli six-axis robots work on the assembly and inspection line. Image Credit: Ralf Högel
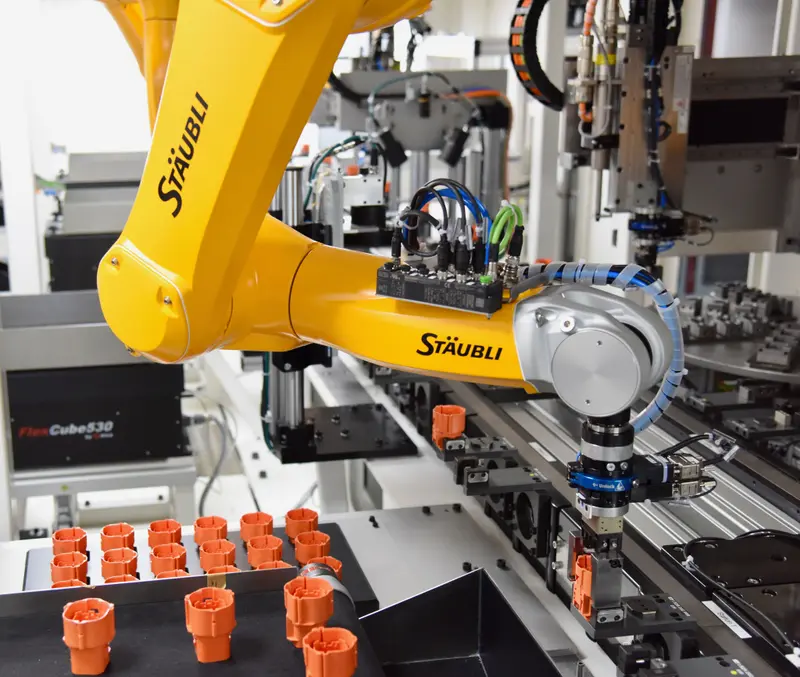
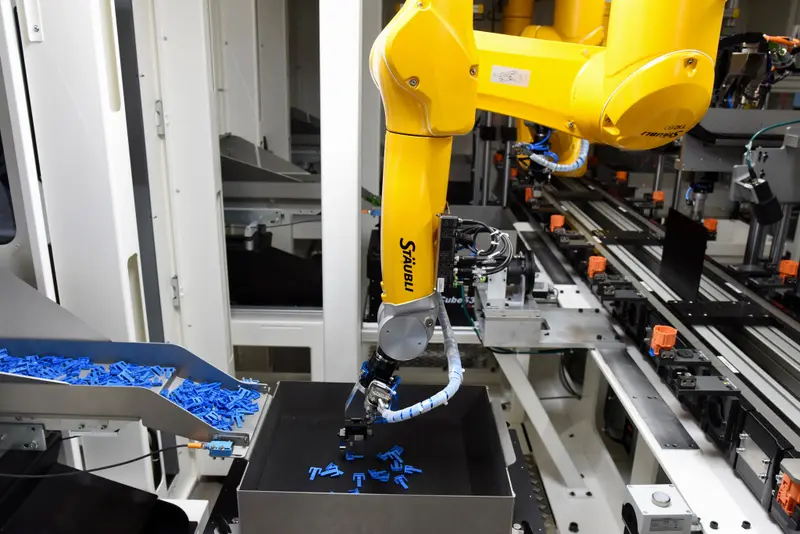
The first of the six installed TX2-60L robots places a connector housing into the workpiece carrier. Image Credit: Ralf Högel
The second Stäubli six-axis robot picks up a connector lock from a vibration platform and attaches it to the connector housing. Image Credit: Ralf Högel
Customer Usage
Three versions of this system are currently running, but their number is expected to increase significantly. The system's highly flexible design means this development will pose no issues for users, and the changeover from the last part of the current product to the first part of the next can be completed in just 10 minutes.
The system exceeded the required cycle time of three seconds, even during the pre-startup phase. The cycle time is currently around 2.7 seconds per high-voltage connector, precisely corresponding to the simulation previously carried out in cooperation with Stäubli.
The simulation's result fully matches reality, highlighting just how precisely processes can be simulated with the right tools. Eberhard also envisions the potential for further cycle time optimization via on-site fine-tuning.
Acknowledgments
Produced from materials originally authored by Staubli Corporation.

This information has been sourced, reviewed and adapted from materials provided by Stäubli Robotics.
For more information on this source, please visit Stäubli Robotics.